9.2 CANopen Communication
9-32
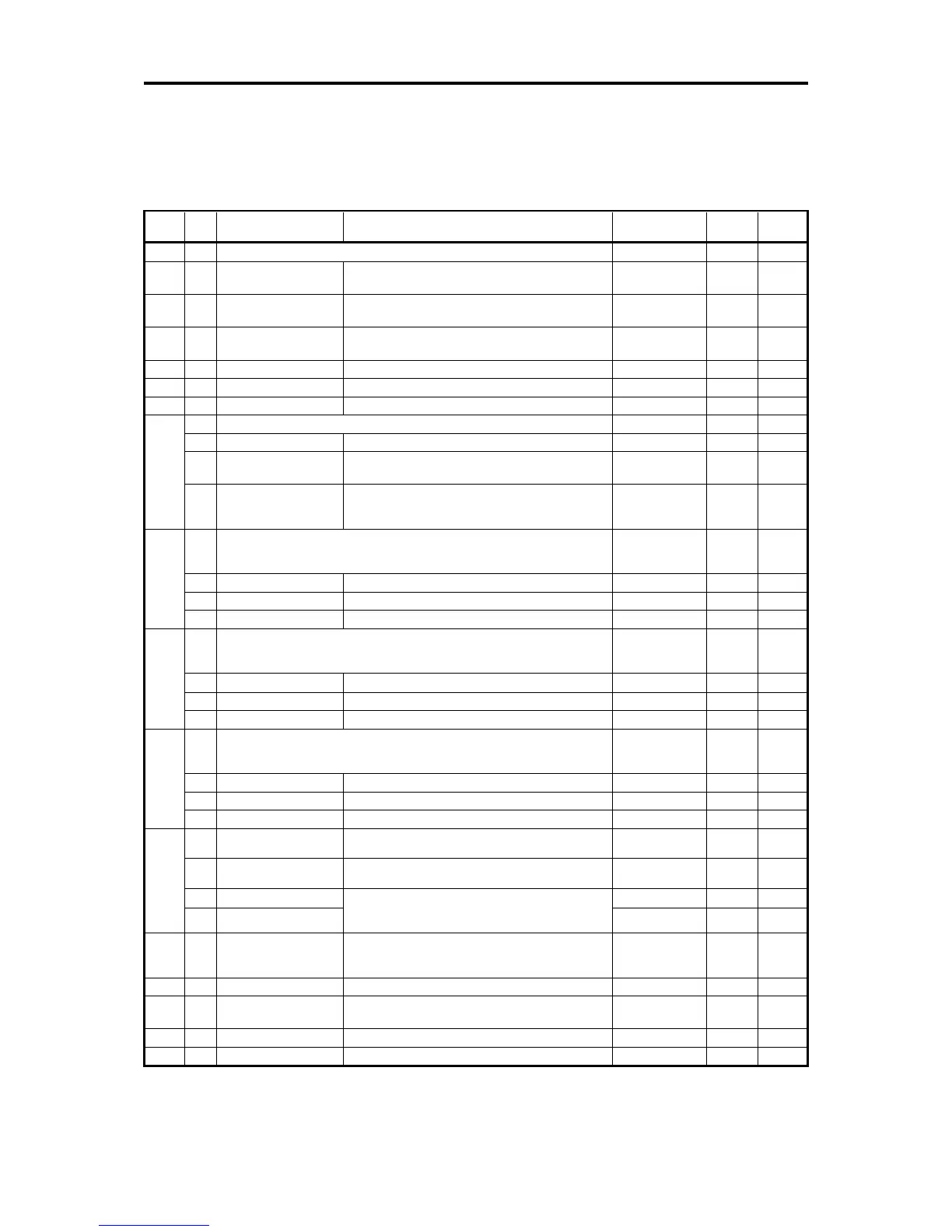
9.2.9 Standard device profile area
Table 9.2-17 lists the objects in the standard device profile area specific. In the access field, R represents read only,
W represents write only, and RW represents readable & writable. In the data hold field, O represents that the
written data is held after the power OFF.
Table 9.2-17 Objects in Standard Device Profile Area
Index
(Hex)
Sub Name Description Data type
Data
hold
Access
Communication abort behavior (Same as y36)
603F - Error code
Alarm history (latest)
(For details, refer to the Table 9.2-22)
UNSIGNED16 - R
6040 - Controlword
(DS 402 state machine control)
UNSIGNED16 - RW
6041 - Statusword
Status monitor
(display the DS 402 state machine status)
UNSIGNED16 - R
6043 - vl velocity demand Monitor the output speed (r/min) INTEGER16 - R
6046
- vl velocity min max amount ARRAY - -
1 vl velocity min amount
Lower limit speed (r/min)
(corresponding to the inverter function code F16)
UNSIGNED32 Y RW
2
vl velocity max
amount
(corresponding to the inverter function codes
F03/A01 *1)
UNSIGNED32 Y RW
6048
-
vl velocity acceleration
(Delta speed/Delta time sets the acceleration. It corresponds to the inverter
function code S08)
RECORD - -
Speed increment (r/min) for Delta time
6049
-
vl velocity deceleration
(Delta speed/Delta time sets the deceleration. It corresponds to the inverter
function code S09)
RECORD - -
0 Number of entries Number of subindexes: 2 UNSIGNED8 - R
Delta time sets the deceleration (r/min)
(Delta speed/Delta time sets the deceleration. It corresponds to the inverter
function code H56)
RECORD - -
0 Number of entries Number of subindexes: 2 UNSIGNED8 - R
Delta time sets the deceleration (r/min)
2 Delta time Time (s) UNSIGNED16 Y *2 RW
604B
- vl set-point factor
Changes the resolution and range for the speed
setting
ARRAY - -
0
Highest sub-index
supported
Number of subindexes: 2
INTEGER16 - R
1 Numerator
(Except for 0; treated as “1” when the setting is
made.)
INTEGER16 - RW
2 Denominator INTEGER16 - RW
604D - vl pole number
Number of motor poles
(corresponds to the inverter function codes
P01/A15 *1)
UNSIGNED8 Y RW
6061 -
Modes of operation
display
Selected state of the DS 402’s mode
Always fixed at 2=Velocity mode
INTEGER8 - R
Actual value of instantaneous torque
6078 - Current actual value Actual value of output current INTEGER16 - R
*1: The corresponding inverter function code automatically changes according to the motor’s selected state.
For information about mode selection, refer to Chapter 5 “5.3.6 A codes (Motor 2 parameters)”.
*2: If the power is turned OFF, the acceleration and deceleration slope values are held.

 Loading...
Loading...









