12.1 Standard Model
12.1.1 ND-mode inverters for general load
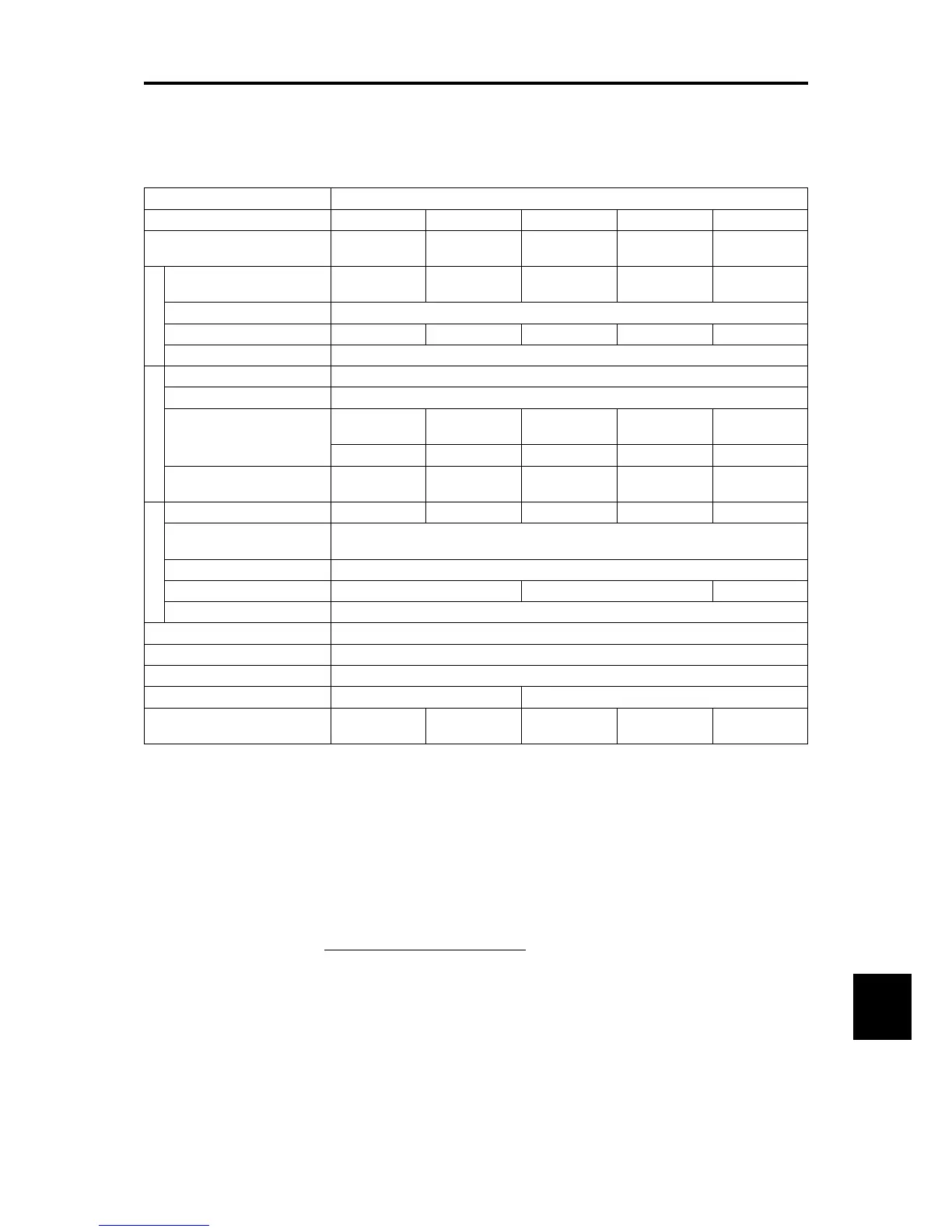
■ Standard-model, Three-phase 400 V (460 V) class series (ND-mode: 0.75 kW to 5.5 kW)
Item Specifications
Type (FRN_ _ _ _E2S-4) 0002 0004 0006 0007 0012
Nominal applied motor (kW) [HP]
(Output rating)
Three-phase 380 to 480 V (with AVR function)
Rated current (A) *4 2.1 4.1 5.5 6.9 12
Overload capability 120%-1 min
Input power
Voltage, frequency Three-phase 380 to 480 V, 50/60 Hz
Allowable voltage/frequency
Voltage: +10 to -15% (Interphase voltage unbalance: 2% or less)
1.1 2.1 3.0 4.1 7.0
Braking
Torque (%) *9 53% 50% 48% 29% 27%
DC braking
Braking starting frequency: 0.0 to 60.0 Hz, Braking time: 0.0 to 30.0 s,
Braking level: 0 to 60%
Braking transistor Built-in as standard
Minimum resistance value (Ω)
200 160 130
Braking resistor Separately mounted option
DC reactor (DCR) Separately mounted option
Applicable safety standards IEC/EN61800-5-1: 2007
Enclosure (IEC60529) IP20, UL open type
Cooling method Natural cooling Fan cooling
Weight / Mass (kg) [lbs]
1.2
[2.6]
1.5
[3.3]
1.5
[3.3]
1.6
[3.5]
1.9
[4.2]
Note: A box () in the above table replaces GA, GB or C depending on the model.
*1 Fuji 4-pole standard motor
*2 Rated capacity is calculated assuming the rated output voltage as 440 V (460 V).
*3 Output voltage cannot exceed the power supply voltage.
*4 Setting the carrier frequency (F26) to the following value or above requires current derating.
ND spec. of all types : 4 kHz
If the ambient temperature is 40°C (104°F) or above, derating of 2%/°C (2%/1.8°F) relative to the rated
current given in this manual is required. For details, refer to Chapter 10 “10.4.2 Guideline for selecting
inverter drive mode and capacity.”
*6
(IEC 61800-3)
If the unbalance ratio is 2% to 3%, use an optional AC reactor (ACR).
*7 This specification is an estimated value to be applied when the power supply capacity is 500 kVA (Inverter
capacity × 10 when the capacity exceeds 50 kVA) and the power supply with %X = 5% is connected.
*8 This specification applies when a DC reactor (DCR) is used.
*9 Average braking torque for the motor running alone. It depends on the efficiency of the motor.

 Loading...
Loading...









