191
Program description - Helicopter mixer
In the auto-rotation ight phase this mixer
is automatically switched off.
Set-up notes:
To set the mixer value accurately you should
either rst y several high-speed pirouettes
against the direction of main rotor rotation or,
if a strong wind is blowing, hover at right angles to the
wind with a sufciently large tail rotor deection. Set
the mixer value so that there is no fall-off in system
rotational speed.
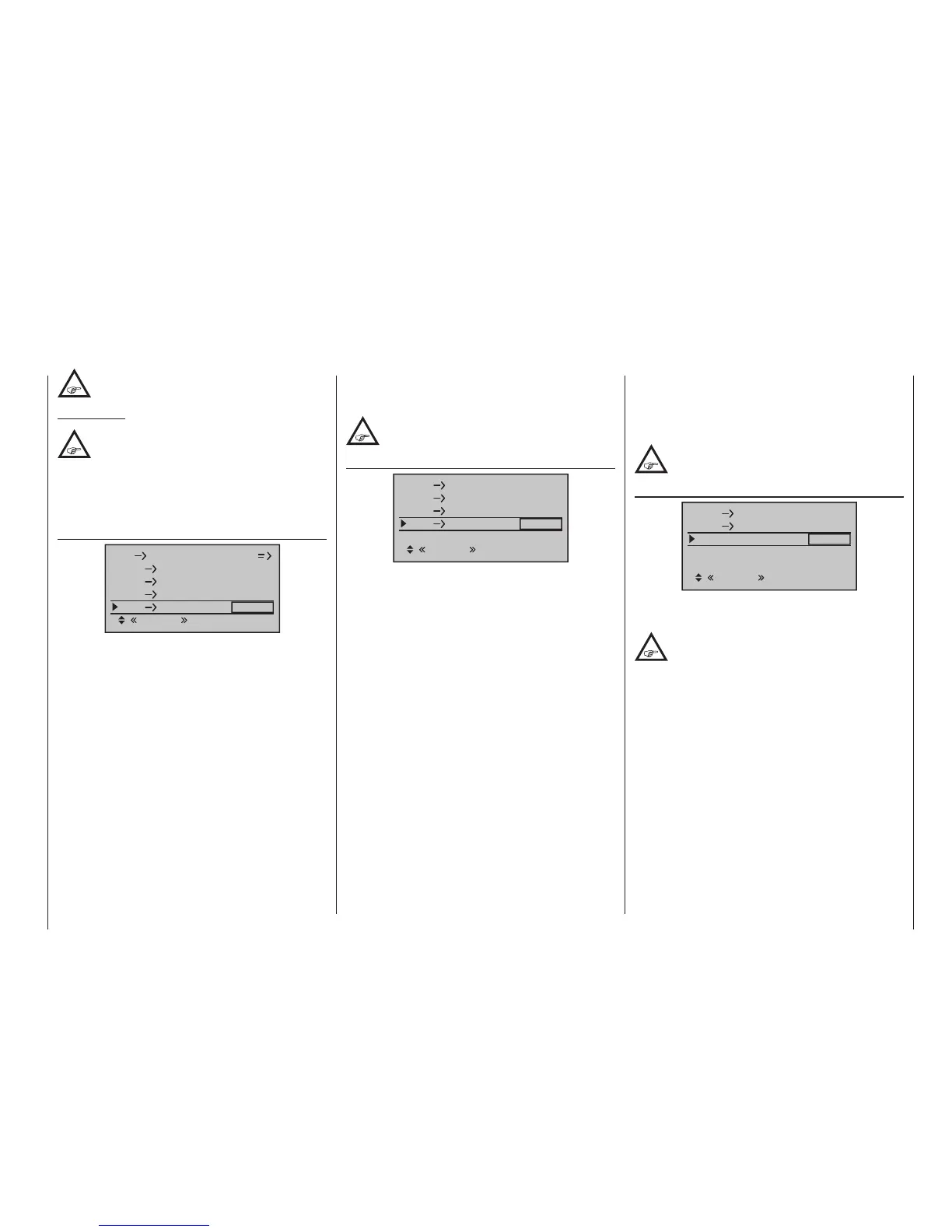
Roll Throttle and Nick Throttle
0%
0%
SEL
0%
0%
normal
C1
Tail
Tail
Roll
Throttle
Roll
Throttle
Tail
Nick
Throttle
Increasing collective pitch is not the only change that
requires the throttle to follow suit: major cyclic control
movements also require this, i. e. if the swashplate is
tilted in any direction. The program of the transmitters
mc-16 HoTT and mc-20 HoTT lets you adjust the
degree of throttle follow separately for roll and pitch-
axis controls.
This offers particular advantages in aerobatic flying,
e. g. when flying a roll: here, with moderate collective
pitch values and the carburettor only about half-open,
cyclic control travels are nonetheless executed that
require much higher performance from the motor.
The mixer value can be varied within the range 0 to
+100 %. The correct mixer direction is automatically
taken into account.
The mixer value can be varied within the range 0 to
+100 %.
The mixer direction is determined automatically by your
definition of the direction of main rotor rotation on the
»Helicopter type« menu, page 102.
In the auto-rotation ight phase this mixer
is automatically switched off.
Gyro suppress
0%
0%
SEL
0%
0°
normal
0%
Nick
Nick
Throttle
Tail
Swash rotation
Gyro suppress
Gyro gain
Important:
In normal situations, this function should
not be used if your model is tted with a
modern gyro system. In this context, en-
sure that you comply with the instructions on
adjusting your gyro: if not, you risk making ad-
justments that render your helicopter impossible
to y. This menu has nonetheless been retained in
order to cater to a full range of requirements and
ying habits.
With this option, the effect of the gyro sensor (“gyro”)
can be varied according to the tail rotor stick position;
this assumes the use of a gyro system whose gyro gain
can be controlled from the transmitter via an auxiliary
channel. This channel will be channel 7 for Graupner
remote control systems.
A simultaneous tap on the or keys of the right
four-way button (CLEAR) will reset a changed value in
an active (inverse video) field back to 0 %.
In the auto-rotation ight phase this mixer
is automatically switched off.
Roll Tail and Nick Tail
0%
0%
SEL
0%
0%
0%
normal
Roll
Roll
Throttle
Tail
Nick
Nick
Throttle
Tail
Gyro suppress
Increasing pitch is not the only change that requires a
corresponding torque compensation via the tail rotor:
major cyclic control movements also require this, e. g. if
the swashplate is tilted in any direction. Here, too, the
program of the transmitters mc-16 HoTT and mc-
20 HoTT lets you configure settings for both types of
tilt movement (roll and pitch-axis) separately.
For advanced aerobatics in particular, which involve
very large control deflections in the pitch-axis controls,
e. g. the “Bo-turn” (vertical pull-up followed by tipping
over around the pitch-axis) and tight loops, the uncom-
pensated torque present in these flights causes the
model to turn to a greater or lesser degree around the
yaw axis. This spoils the appearance of the maneuver.
These two mixers permit static torque compensation to
be activated by the swashplate tilting in any direction.
The mixers work by always increasing tail rotor thrust,
starting from the centre point of the roll and pitch-axis
sticks, i. e. they always generate a tail rotor deflection
in the same direction regardless of the direction of the
command.

 Loading...
Loading...








