Appendices
A - 108
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
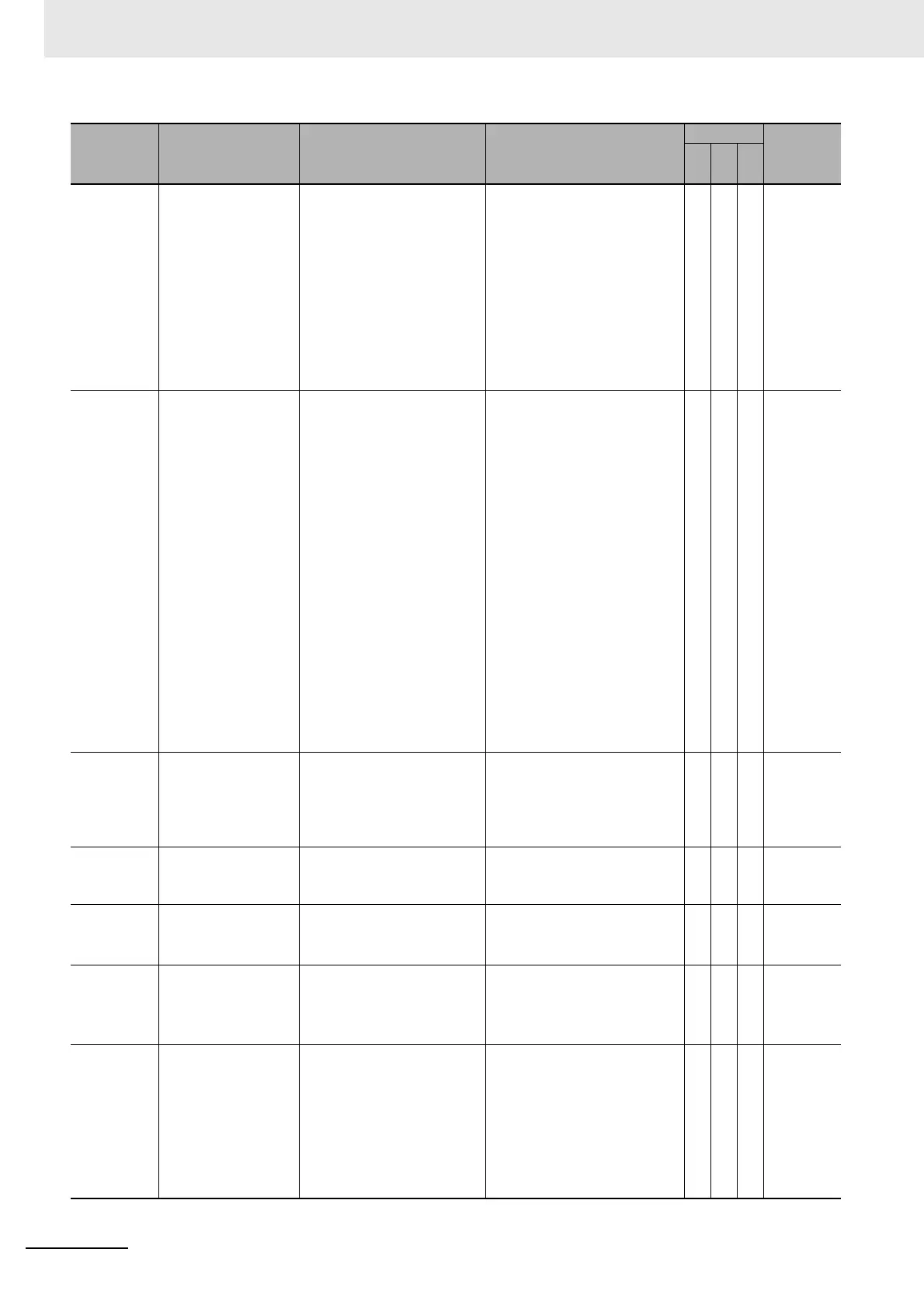
78210000 Brake Interlock Error The Brake Interlock Output
(BKIR) was output by the
Timeout at Servo OFF.
• The Brake Interlock Output
(BKIR) was output because
the motor rotation speed did
not decrease to or less than
the speed set in the Thresh-
old Speed at Servo OFF
within the time set in the
Timeout at Servo OFF
when Servo OFF was per-
formed during the motor
operation
√ P. A-157
78230000 Command Error A mistake was made in
using a command.
• When bit 9 (Remote) of the
Statusword was set to 1
(remote), and the Servo
Drive was in Operation
enabled state (Servo ON),
the Servo Drive received a
command to change the
communications state from
Operational to another state
(Init, Pre-Operational, or
Safe-Operational)
• A mode of operation other
than the hm mode was set
during the homing operation
• Modes of operation was set
to pp, pv or hm mode when
the communications period
was set to shorter than
250 μs
√ P. A-158
84B10000 EtherCAT State
Change Error
A communications state
change command was
received for which the cur-
rent communications state
could not be changed.
• A communications state
change command was
received for which the cur-
rent communications state
could not be changed
√ P. A-159
84B20000 EtherCAT Illegal
State Change Error
An undefined communica-
tions state change com-
mand was received.
• An undefined communica-
tions state change com-
mand was received
√ P. A-159
84B40000 Synchronization
Error
A signal for synchronous
communications could not
be detected.
•Noise
• Error of the EtherCAT slave
communications controller
√ P. A-160
84B50000 Sync Manager WDT
Error
PDO communications were
interrupted for the allow-
able period or longer.
• An EtherCAT communica-
tions cable is disconnected,
loose, or broken
• Host controller error
√ P. A-160
84B60000 ESC Initialization
Error
The initialization of Ether-
CAT slave communications
controller failed.
• Data was incorrectly over-
written in the non-volatile
memory of the EtherCAT
slave communications con-
troller
• Failure of the EtherCAT
slave communications con-
troller
√ P. A-161
Event code
(hex)
Event name Description Assumed cause
Level
Refer-
ence
Min
Obs
Info

 Loading...
Loading...

