Chapter 5
Setup and Configuration
RUGGEDCOM ROS
User Guide
184 Configuring Priority to CoS Mapping
Parameter Description
is enabled the switch will use the Differentiated Services bits in
the TOS field.
4. Click Apply.
Section5.3.3
Configuring Priority to CoS Mapping
Frames received untagged can be automatically assigned a CoS based on their priority level.
To map a priority level to a CoS, do the following:
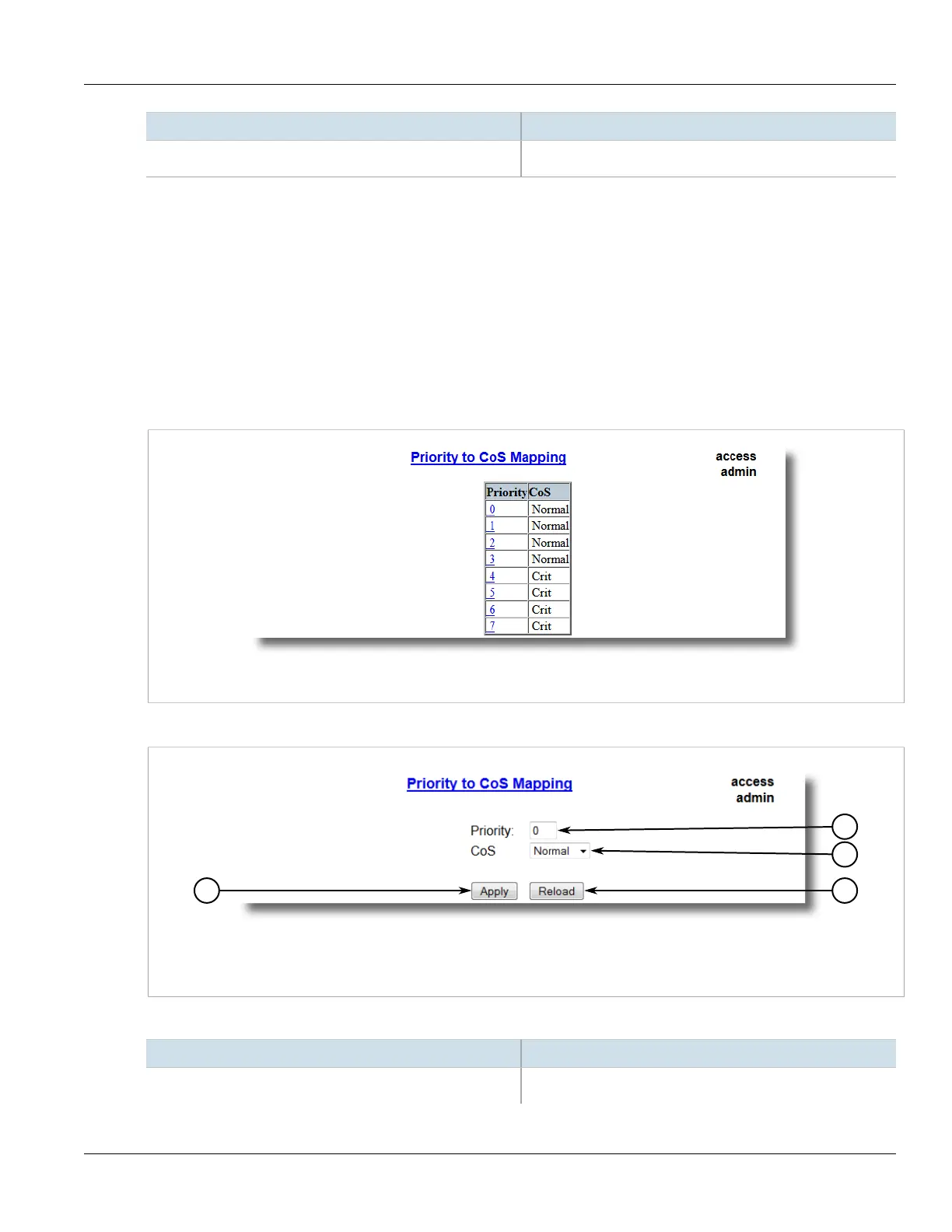
1. Navigate to Classes of Service» Configure Priority to CoS Mapping . The Priority to CoS Mapping table
appears.
Figure110:Priority to CoS Mapping Table
2. Select a priority level. The Priority to CoS Mapping form appears.
Figure111:Priority to CoS Mapping Form
1.Priority Box 2.CoS List 3.Apply Button 4.Reload Button
3. Configure the following parameter(s) as required:
Parameter Description
Priority Synopsis: 0 to 7
Default: 0
 Loading...
Loading...



