Brake power output 1A @ 48V
Brake peak current 4A
Digital I/O 5x Digital IO (3.3/5V)
1x Digital Output (3.3/5V)
1x Digital Input (24V)
Analog In 1x Analog In Single Ended (0-5V)
1x Analog In Differential (±2.5V)
Motor temperature sensor input
(user configurable)
1 x KTY (for example KTY84-130) / PT1000 / PT100
[1]
Heatsink Aluminum
Integrated brake Yes (optional)
[1]
Using a PT100 is not recommended. Click here for details about temperature sensors
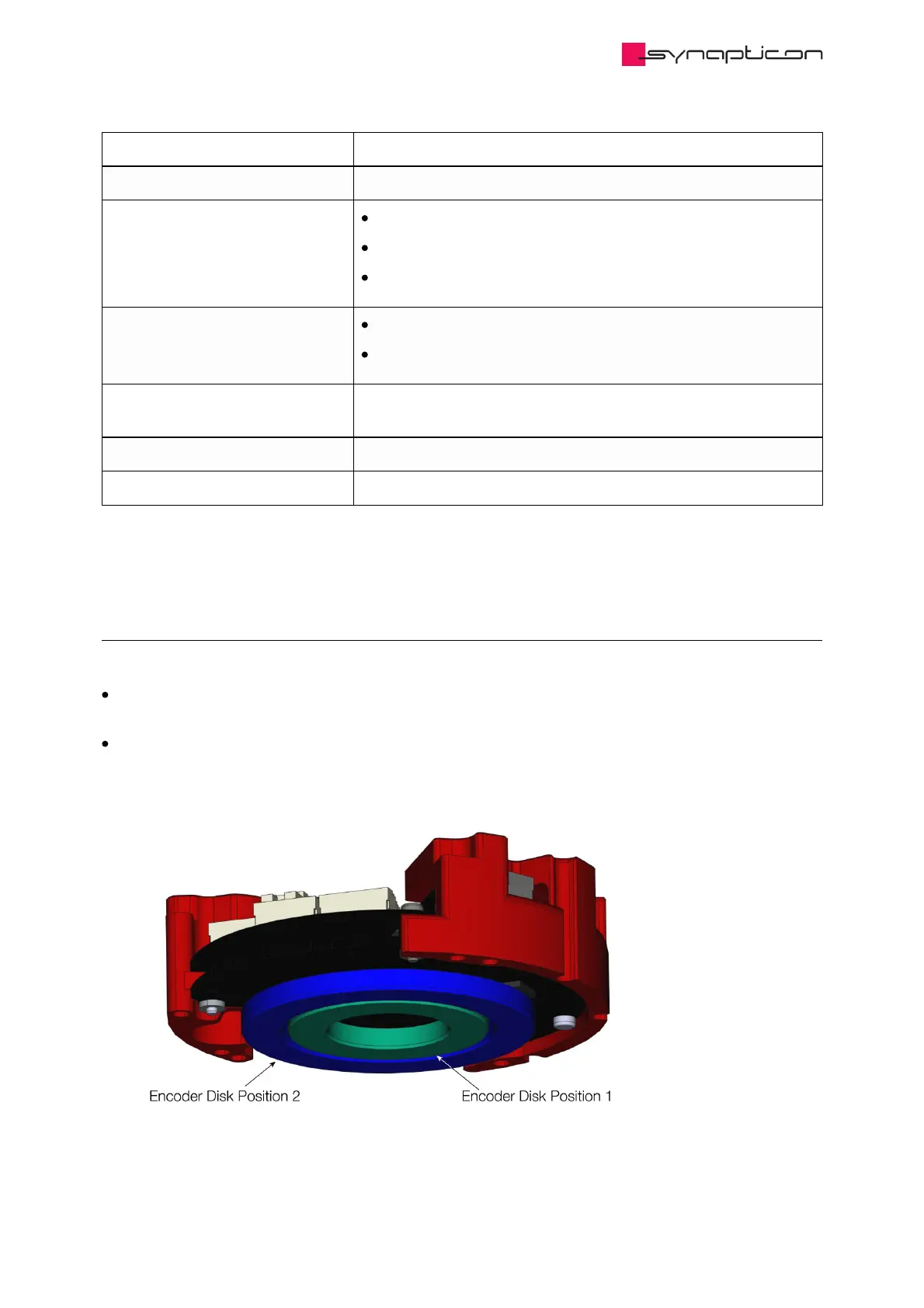
1.2.6.1.3 Optional Integrated Encoders
SOMANET Circulo is available in different versions:
With one additional encoder ring in two positions which is mounted on the motor for position control,
velocity control and commutation.
With two additional encoder rings, one mounted on the motor for velocity control (dual loop control) and
commutation and one mounted on the joint for position control.