3.1.8.3.7 Torque Offset
This feature can be used to improve the performance of highly dynamic motion.
Use case: Dropping a load
If a load torque in a joint suddenly decreases, an involuntary movement can occur when the control
algorithm tries to compensate. To avoid this peak in torque deviation, the torque-offset object can be
used. The central application controller “knows” when the robot will drop the payload and how much
this payload is. The robot master controller can use the kinematic model of the robot to compute how
much torque this payload will add to each of the joints. So it can command these torques as offset
torque to each joint. So right at the moment when the robot drops the payload, it will exert the exact
amount of compensation torque that is required to stay in its desired pose.
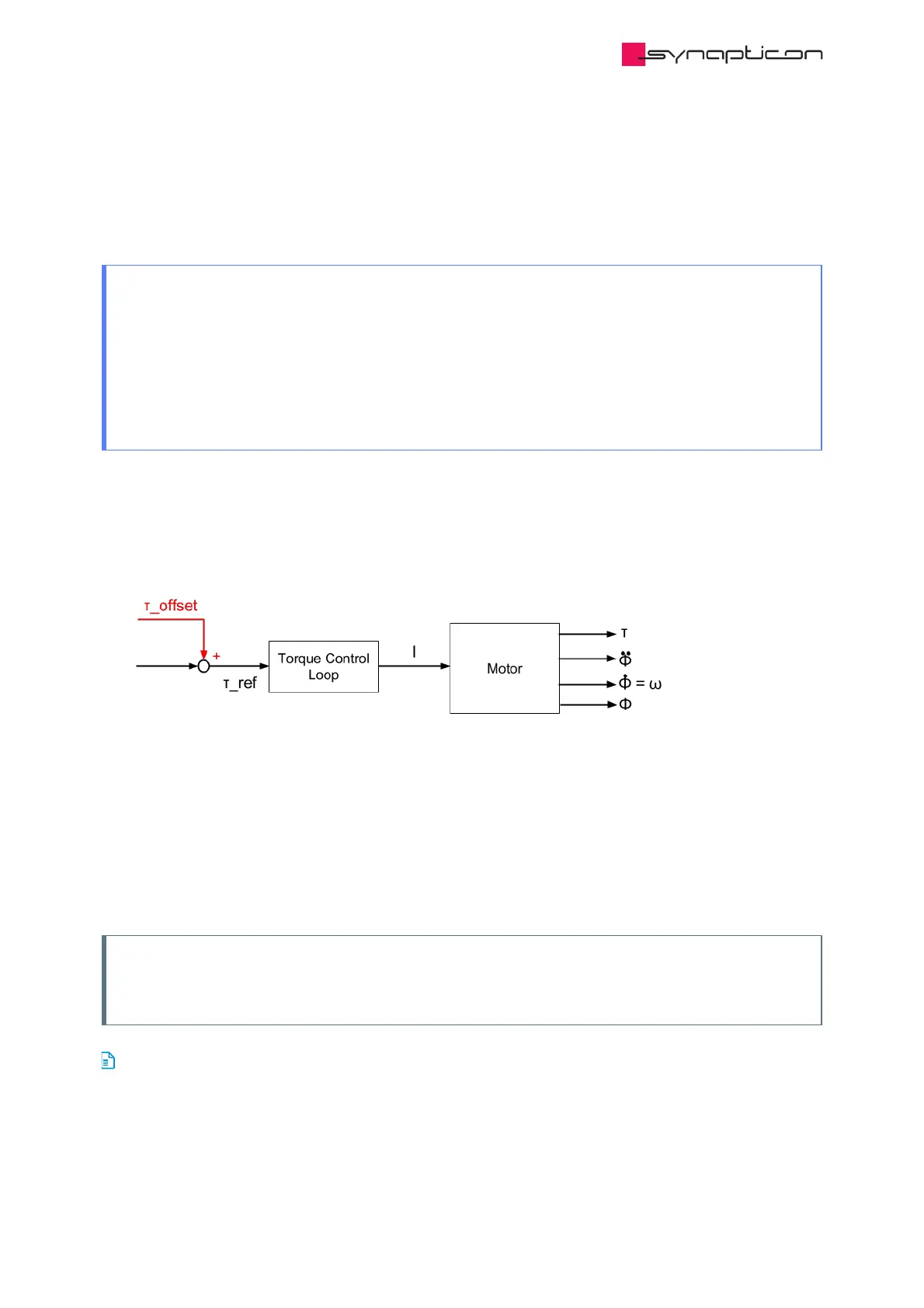
On top of the desired velocity input, the position and velocity controllers also accept a desired ‘offset torque’,
which is a dynamically changeable torque value that will be added to the torque value generated by the
velocity PI controller. This applies to the simple PID position controller, to the cascaded position controller and
to the velocity controller. The offset torque can be updated at full EtherCAT communication frequency (4 kHz
in most configurations) and is given in the unit of per thousands of rated torque.
To use this feature, the high level robot control must contain a model or any other knowledge about the
system’s physics, e.g. acceleration feed forward or gravity compensation.
The robot master controller can use the kinematic model of the robot to compute how much torque this
payload will add to each of the joints. So it can command these torques as offset torque to each joint. So right
at the moment when the robot drops the payload, it will exert the exact amount of compensation torque that
is required to stay in its desired pose.
Note
As this value should be fed dynamically with continuously updated values, it is not accessible in OBLAC
Drives, but through the EtherCAT object 0x60B2.
60B2 Torque Offset This object provides the offset for the torque value.