3.1.8.3.11.3.3 Result
Bit 13 of the Statusword indicates that the following error is outside the allowed window:
0: value within error tolerance
1: value exceeds error tolerance
Following error actual value 0x60F4 [inc]: Provides the actual value of the following error.
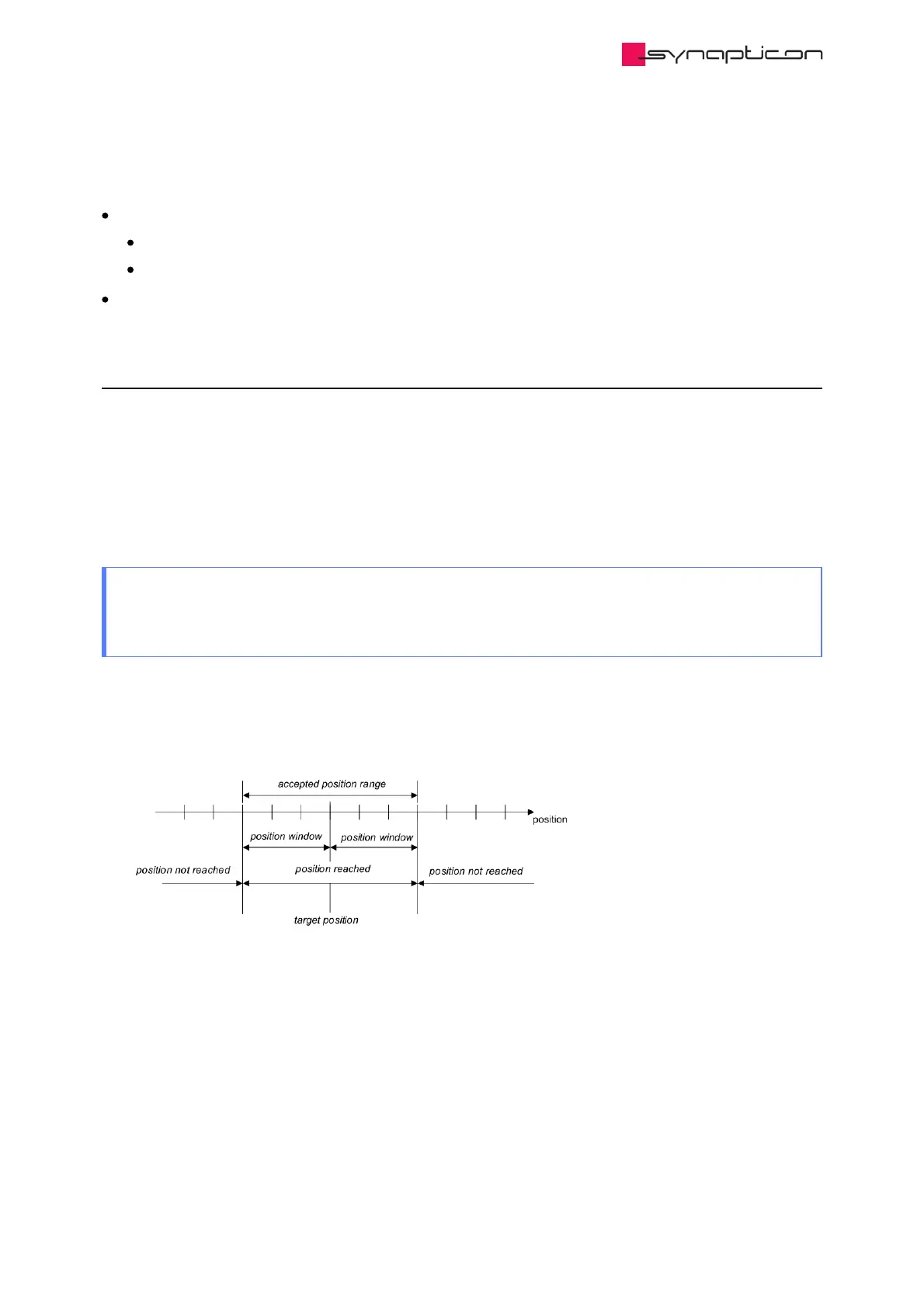
3.1.8.3.11.4 Target reached function
This feature can be used to inform the user if the requested target was reached (for example if the target
position was set in the Profile mode). A specified target (position, velocity or torque) can be defined with a
margin at each side.
If the actual value is inside of the accepted position range for a configured period of time, the user is informed
that the target position has been reached.
This information is reflected by bit 10 of the statusword.
Use case: Pick and place operation
In case the real position where the good is to be picked up or placed has more margin than the precision
of the motion control system, using a wider position window allows a faster operation.
3.1.8.3.11.4.1 Definitions