The cascaded position controller consists of two PID feedback loops. The outer loop is used to compare the
target position (current position setpoint) with the actual position value. From this difference, the PID
controller computes a target velocity. The inner loop will compare this target velocity with the currently
measured velocity and feed this difference to another PID controller that generates a target torque from this.
This target torque is then controlled by the torque / current control loop described in the section on Torque
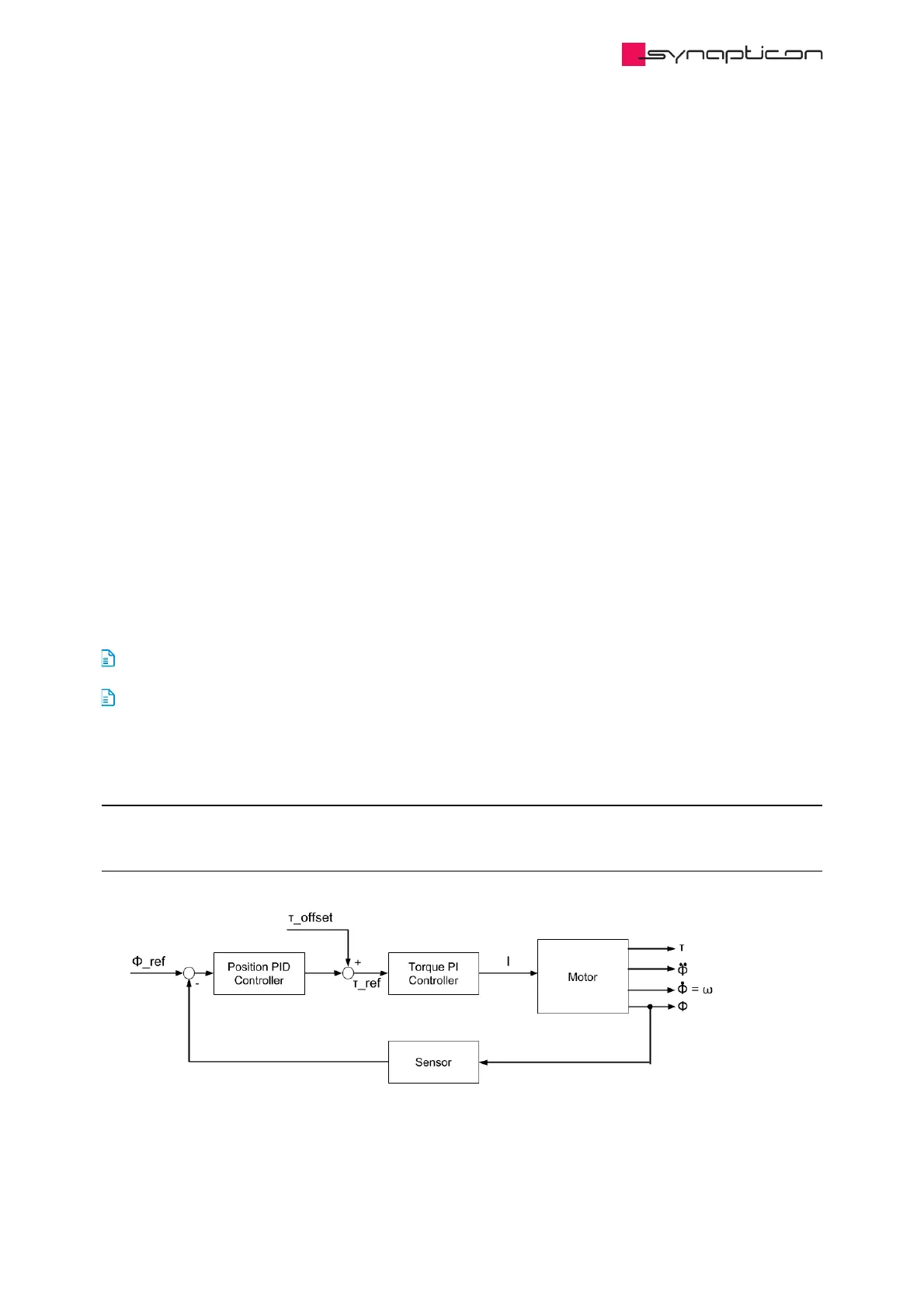
Control. The overall control structure including the underlying torque control loop, the relevant update
frequencies and the object numbers is shown in a simplified form in the figure above.
Although the two control loops offer a total of 8 controller parameters (P-gain, I-gain, D-gain and an integrator
limit), it is not useful to use all of them at the same time. Generally, none of the D-gains should be used in the
cascaded controller and the two I-gains should be used only alternatively, not together. This means that the
control structure is simplified to a combination of one P controller and one PI controller: PI-P or P-PI.
Instead of the cascaded PID controller, OBLAC Drives allows the user to activate the simple PID position
controller. This controller represents the simplest and most known form of position control. However, for
productive use Synapticon recommends to use the cascaded controller. In the simple PID controller, one
Proportional, Integral and Derivative feedback acts on the position itself and will directly generate the target
torque / current.
On top of the desired position input, both position control implementations also accept a desired ‘offset
torque’, which is a dynamically changeable torque value that will be added to the torque value generated by
the velocity PI controller. For further reference see Torque Offset
3.1.8.1.3.1.1 Parameters related to Cascaded PID Controller
0x2010 Torque Controller Values Kp, Ki and Kd for Torque Controller
0x2012 Position Controller Values Kp, Ki and Kd for Cascaded Position Controller (Both loops: Position
and Velocity)
3.1.8.1.3.2 Simple PID Controller
General View