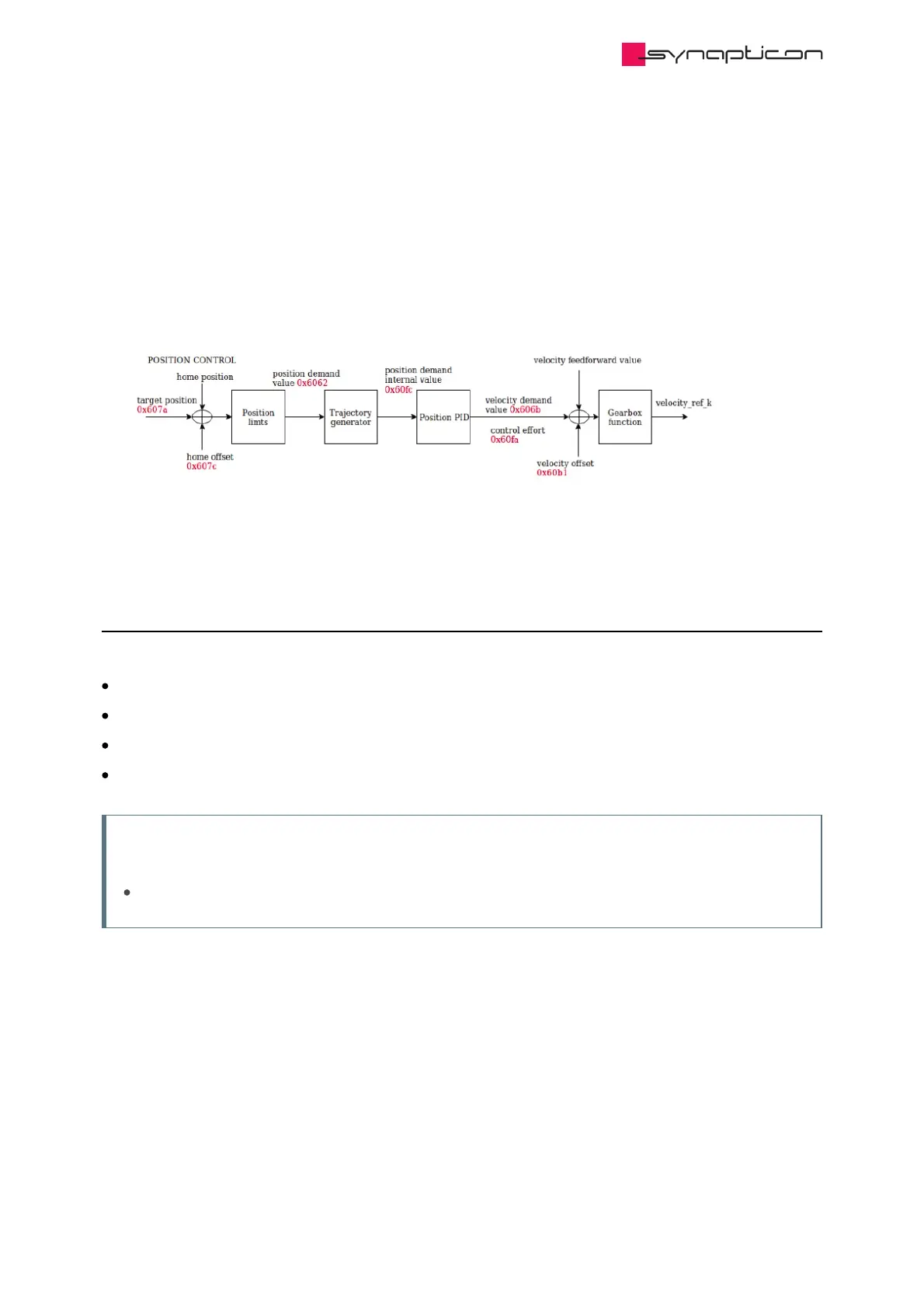
3.1.8.2.2.1 Profile position mode
In Profile Position Mode a target position is applied to the trajectory generator. It is generating a position
demand value for the position control loop taking into account the position limits. The trajectory generator
computes the position demand internal value depending on the configured speed, starting acceleration and
braking deceleration.
3.1.8.2.2.1.1 Objects configuration
The following objects need to be configured for the position profile:
Profile Velocity 0x6081
Profile acceleration 0x6083
Profile deceleration 0x6084
Quick Stop deceleration 0x6085
Note
Profile velocity is limited by the Object:
Max motor speed 0x6080