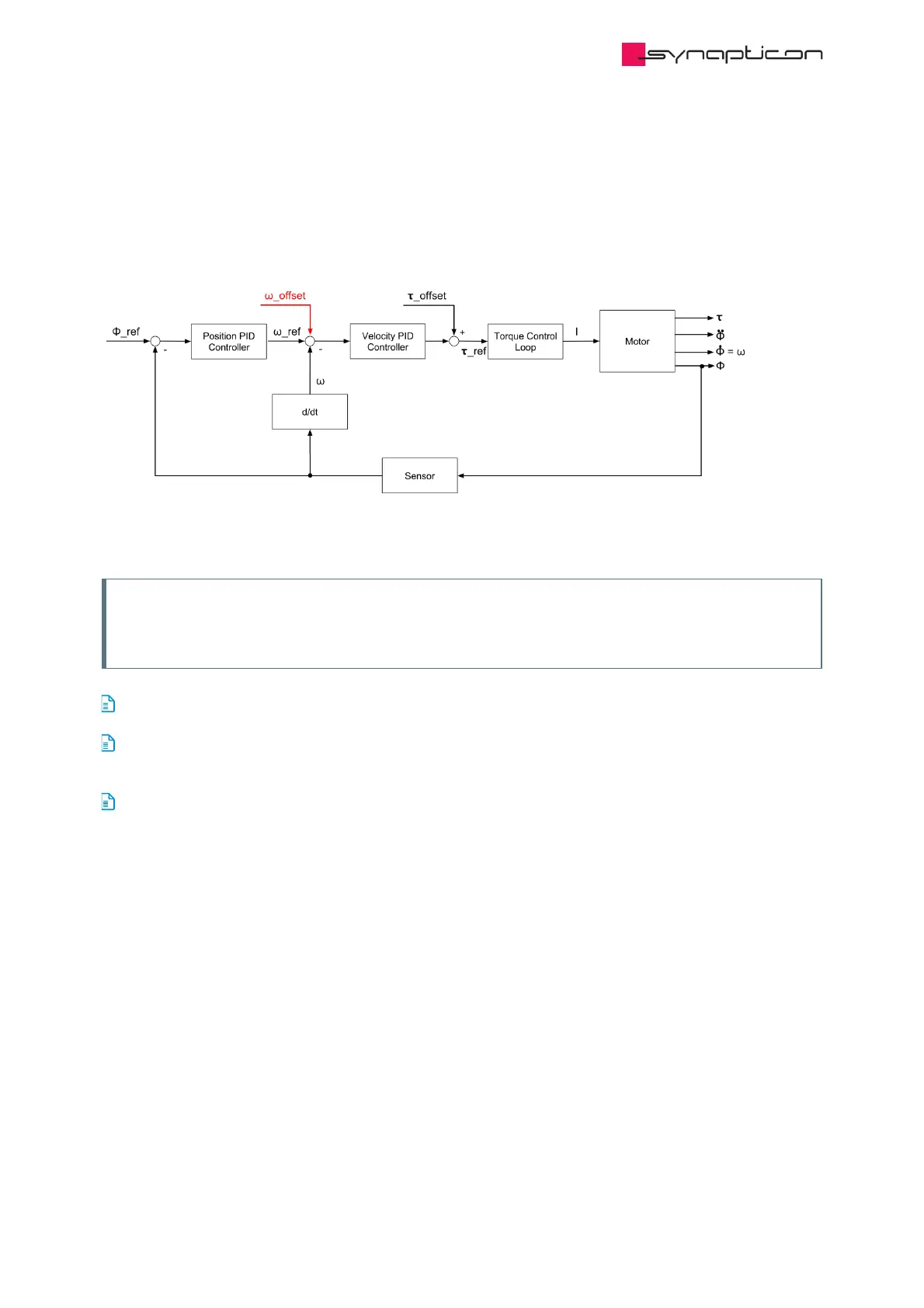
3.1.8.3.8 Velocity Offset
To improve the positioning performance when the position reference is changing dynamically, an additional
velocity offset is available in the cascaded controller.
This velocity offset must be computed by the master, it is not computed on the slave.
Note
As this value should be fed dynamically with continuously updated values, it is not accessible in OBLAC
Drives, but through the EtherCAT parameter 0x60B1.
0x2010 Torque Controller Values Kp, Ki and Kd for Torque Controller
0x2012 Position Controller Values Kp, Ki and Kd for Cascaded Position Controller (Both loops: Position
and Velocity)
60B1 Velocity Offset This object provides the offset for the velocity value.