Note
In our experience, the cascaded PID controller structure is one of the most effective for motor control
applications. For details see PID Controllers: Theory, Design, and Tuning
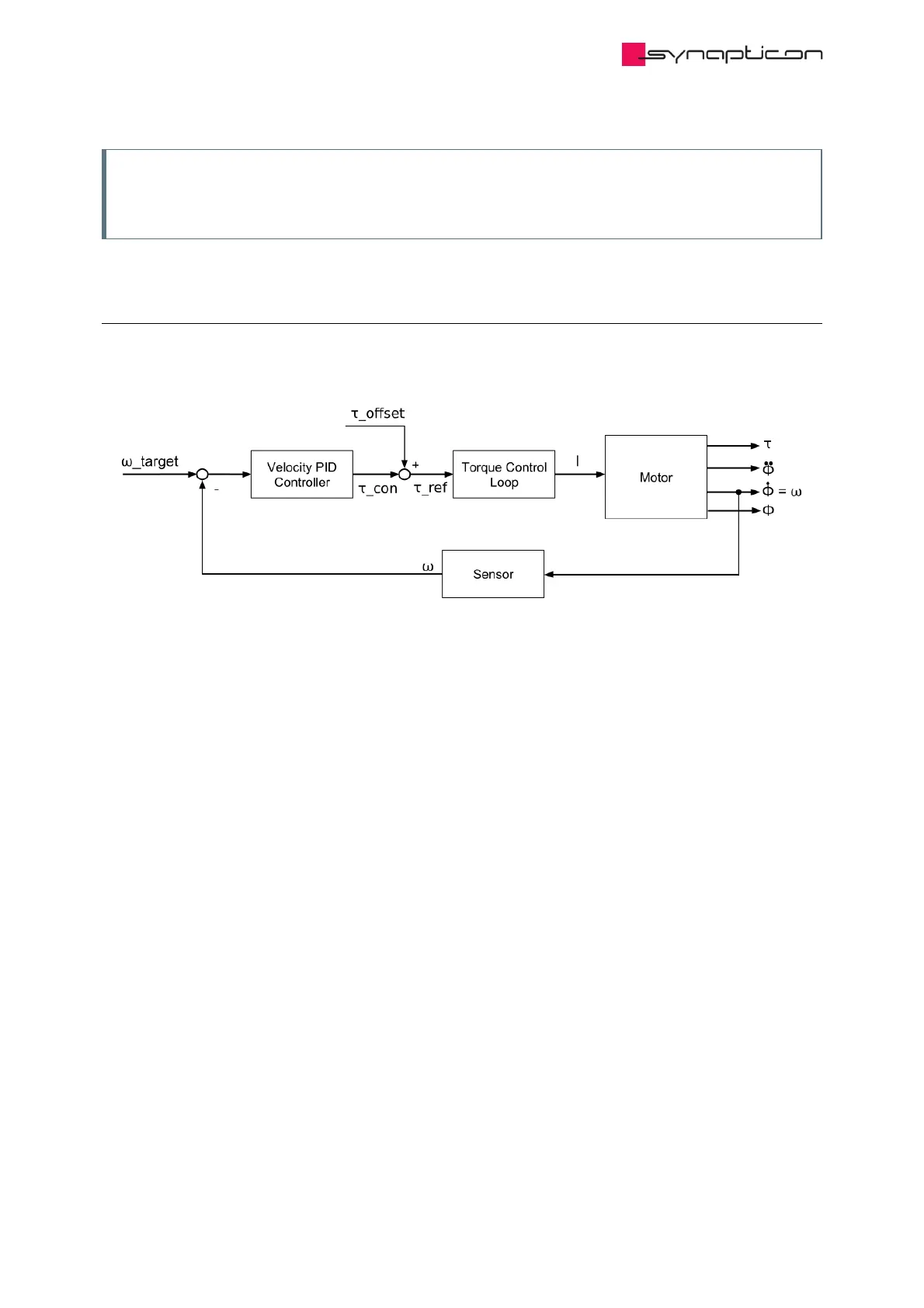
2.4.2.3 Goal of Velocity Auto-tuning
The Velocity Auto-tuning process calculates the gains for the velocity controller automatically.