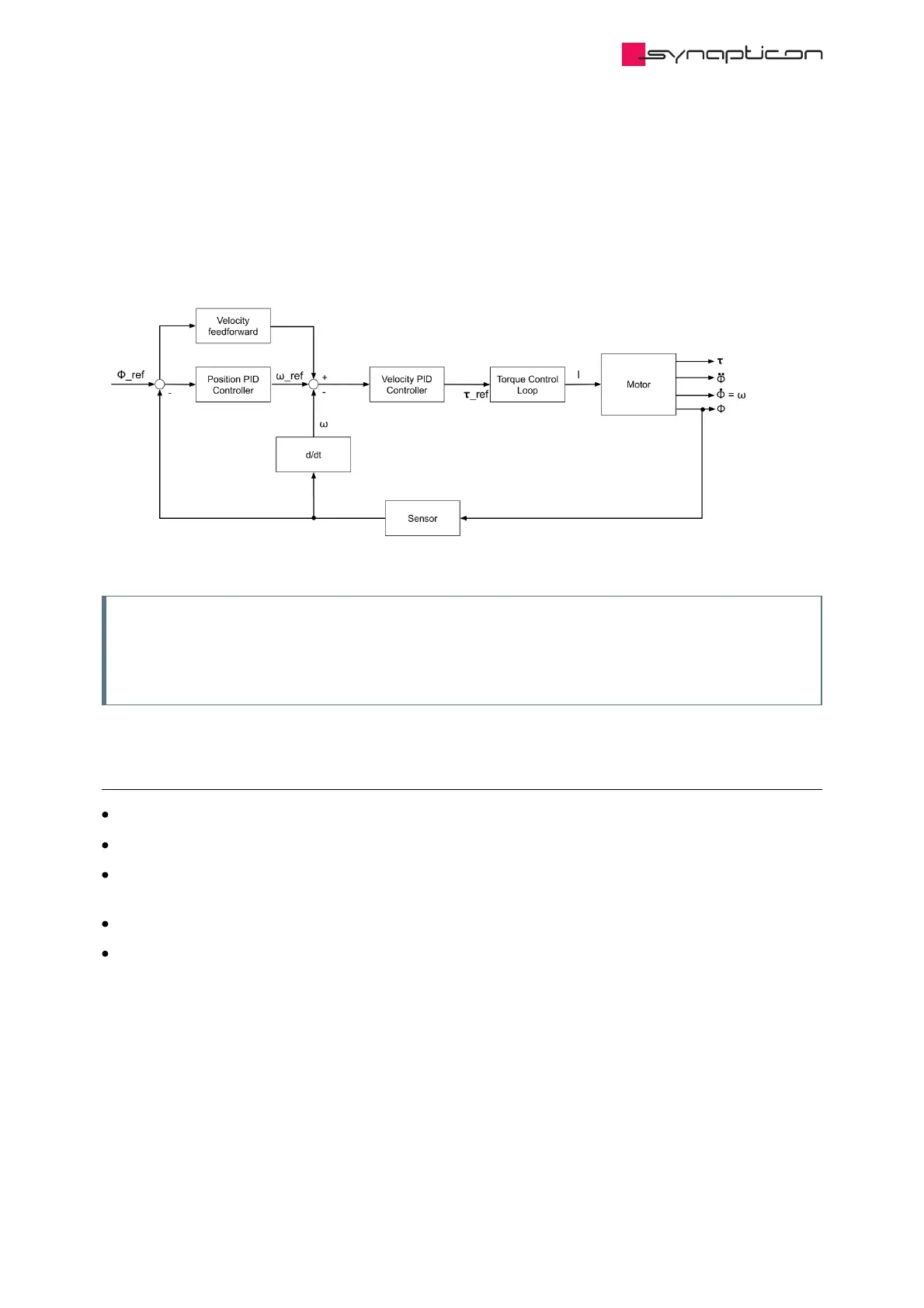
3.1.8.3.6 Velocity feed forward
Velocity feed forward allows to increase performance as the target position signal gets routed directly to the
velocity controller so that the velocity signal can be generated faster. After differentiation, the signal is filtered
by a first-order low-pass filter and multiplied by a configured gain.
Note
The filter is used to smooth the derivative of the target position. This is needed to soften communication
lags (if present), attenuate noise in the target position signal and diminish the influence of target
position quantization.
3.1.8.3.6.1 Usage
Default value of gain is 0 (This means Velocity feed forward is off)
The gain is given in per mil
[1]
. A value of 1000 is a good starting point.
Reduce the cutoff frequency if periodic torque spikes are observed during motion. The default value is 1000
Hz.
Adjust gain and filter cut-off frequencies until torque distortions during motion are acceptable.
To switch off the filter enter a very high cut-off frequency.
[1]
1000 means the target position signal will be routed directly, 500 means scaled to half