3.1.8.3.11.6 Control Effort
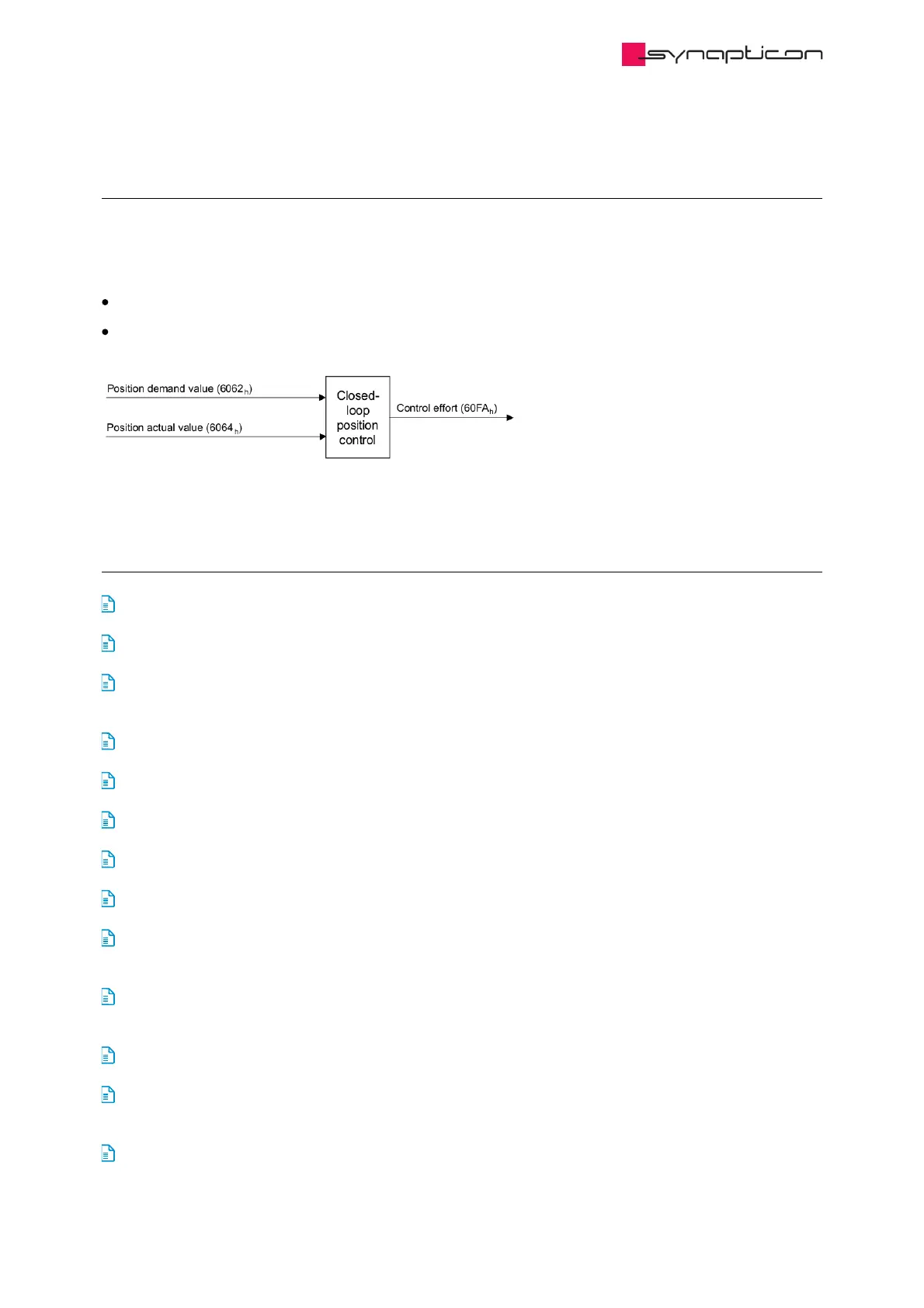
The control effort (object 0x60FA) is the output of the controller for the selected mode.
It provides a measure of the control effort (the output of the position control loop). The units are in user-
defined velocity units (RPM by default; see 0x60A9 SI unit velocity to change it).
If cascaded position control is used, the control effort is velocity demand value
If velocity control is used, the control effort is torque demand value
3.1.8.3.11.7 Parameters related to Control supervision
0x6065 Following error window Half of the configured range of tolerated position values.
0x60F4: Following error actual value Provides the actual value of the following error.
0x6066 Following error timeout Minimum time that the actual position must be out of the window so
that a following error is triggered.
0x6067 Position window Half of the accepted position range.
0x6068 Position window time Time required for the position sensor to remain within the position window.
0x606D Velocity window Half of the accepted velocity range.
0x606E Velocity window time Time required for the value to remain within the velocity window
0x2014 Torque window Indicates the accepted torque values and time.
0x6062 Position demand value Value of the position sent to the position controller after position limits
are checked.
0x60FC Position demand internal value Provides the output of the trajectory generator in profile
position mode.
0x6064 Position value Provides the actual value of the position encoder.
0x606B Velocity demand value Value of the trajectory generator in velocity control / output of the
position controller in cascaded control.
0x606C Velocity value Provides the actual velocity value derived either from the velocity sensor or the