82 • On-Semi Sensor Models Nano Series GigE Vision Camera
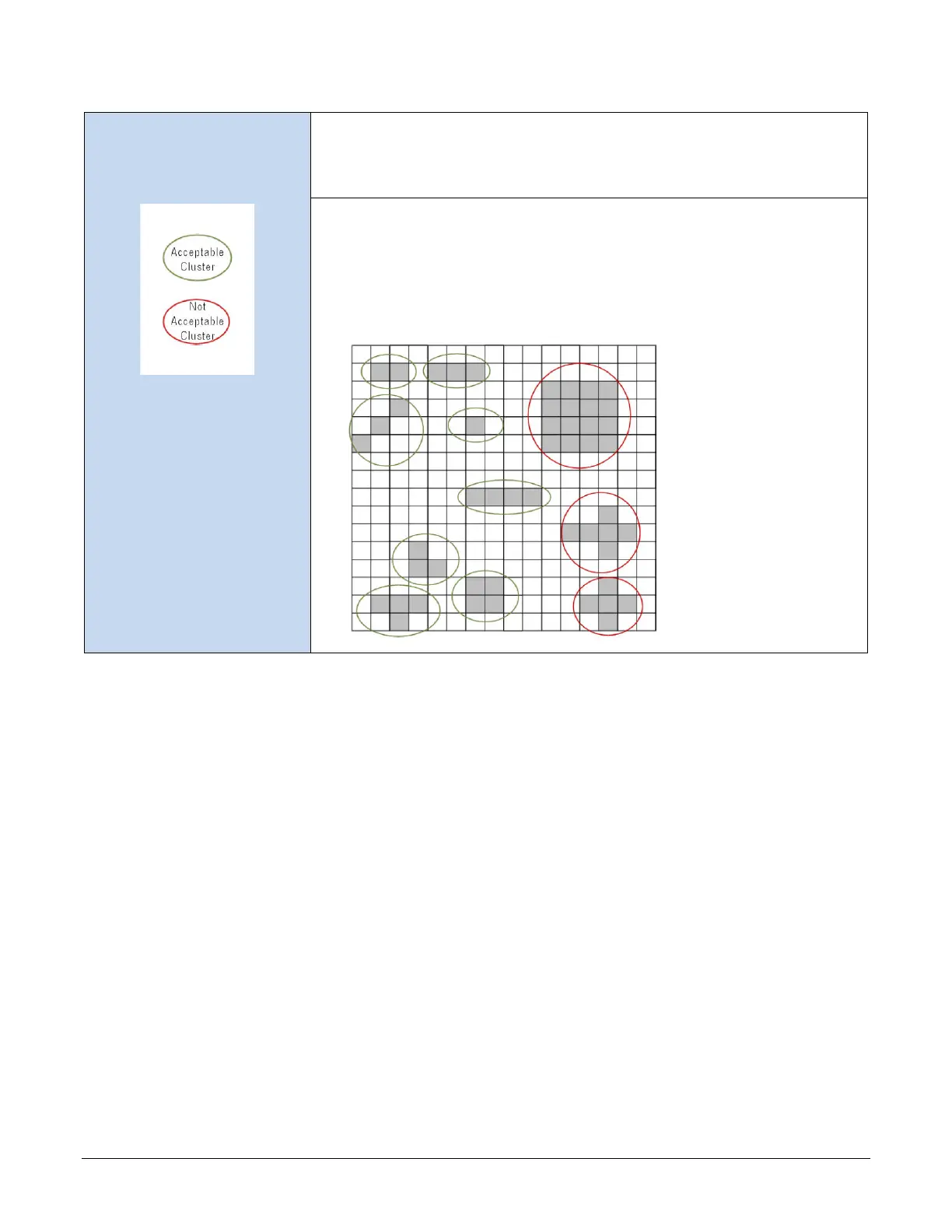
Defective Cluster Definition
Number of clusters allowed in the full window size of 5120 X 5120. A cluster is
defined as a group of neighboring defective pixels (top, Bottom side, not diagonal),
derived from the global defect map.
For color devices: The pixels are divided per color channels (R, G1, G2, B) and then
calculated with the same methodology as mono devices.
Refer to the graphic below:
The number of defective pixels in one cluster is the class (F) of the cluster:
F2 (max 5): 2 defective pixels in the cluster
F3 (max 4): 3 defective pixels in the cluster
F4 (max 3): 4 defective pixels in the cluster
F5 (max 0): 5 or more defective pixels in the cluster
Firmware Files for Models 5100/4090
The latest firmware files for all Nano models are available on the Teledyne DALSA support web site:
http://www.teledynedalsa.com/imaging/support/downloads/firmware/
The firmware files for these models are listed below. The xx denotes the build number.
M4090 & M5100
• Standard
“Genie_Nano_OnSemi_Python_16M-25M_Mono_STD_Firmware_CCA18.xx.cbf”
• High Speed
“Genie_Nano_OnSemi_Python_16M-25M_Mono_HS_Firmware_CCA18.xx.cbf”
C4090 & C5100
• Bayer Output
“Genie_Nano_OnSemi_Python_16M-25M_Bayer_STD_Firmware_DCA18.xx.cbf”
• High Speed Bayer Output
“Genie_Nano_OnSemi_Python_16M-25M_Bayer_HS_Firmware_DCA18.xx.cbf”

 Loading...
Loading...