Maintenance 7. Boards
338 N6 Rev.2
CAUTION
■
Improper jumper pin settings may result in
occurrence of the errors such as below.
Example:
5042: Position error overflow in high power state.
Check the power cable connection, the robot, the driver and the motor.
When replacing the boards, be careful not to configure them incorrectly.
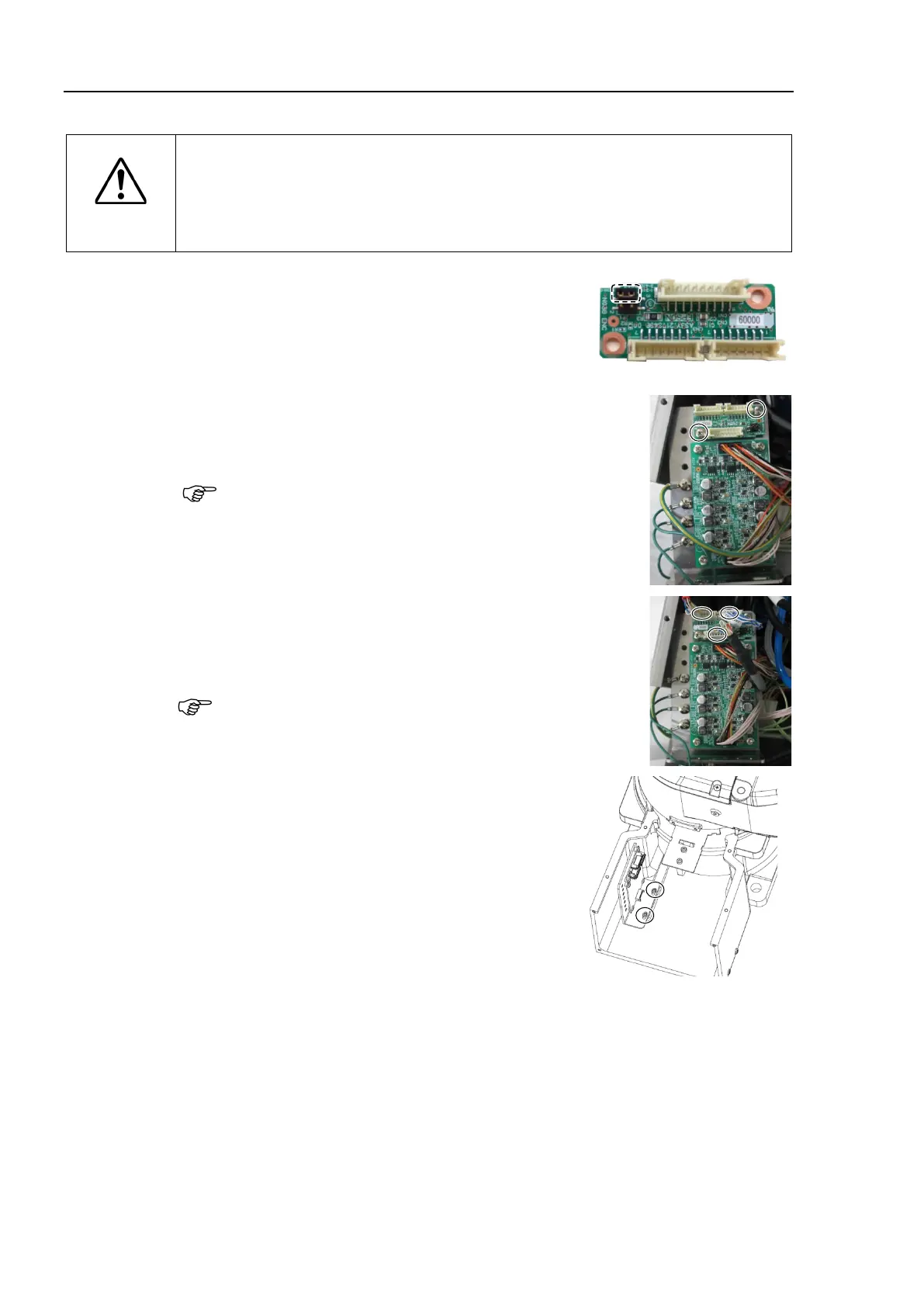
Installation
Encoder Board 1
the jumper pin of the encoder board 1 is at
3-4 short”.
Install the encoder board 1 to the
board fixing plate.
Cross recessed binding head machine screws: 2-M3×6
Tightening torque: 0.45 ± 0.05 N·m
it in the direction as shown in the picture.
s to the encoder board 1.
Connectors:
EB01_CN1, EB01_CN3, EB0x_CN2
Be careful that the jumper pins on the board do not come off.
Install the board fixing plate to the base.
Hexagon socket head cap bolts: 2-M3×6
Tightening torque: 2.0 ± 0.1 N·m

 Loading...
Loading...







