Setup & Operation 5. Motion Range
N6 Rev.2 75
Error: 4248
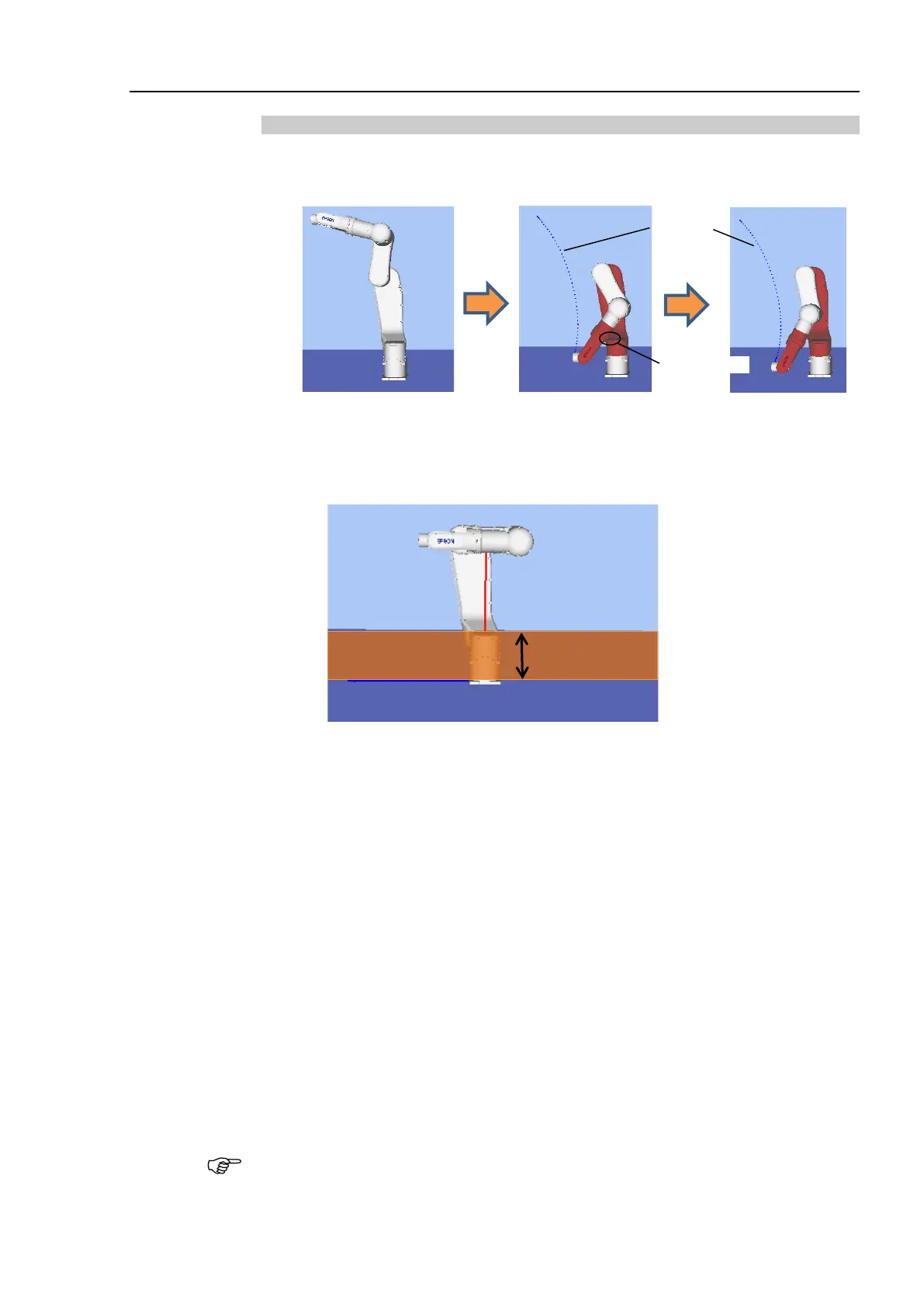
When Manipulator enters into the red area (Fig. 2), “Error: 4248” occurs. The error
occurs in PTP motion and occurs order to avoid a collision to Manipulator itself (Fig. 3).
Fig. 3: Motion that collides with the Manipulator itself
Also, “Error: 4248” will occur when the specified target position is inside the orange area
(Fig.4).
As shown in [Remedy], if “Error: 4248” occurs, set relay points outside of the orange area.
Fig. 4: Range of target position that “Error: 4248” will occur
The range of Fig. 4 is when Tool 0 and Local 0.
[Remedy] Set relay points to avoid a collision.
P1 = XY(-420,0, 1200, 0, -90, 0) /R /A /NF
P2 = XY(0,420, 280, 0, -90, -90) /R /B /F
P3 = XY(0,420, 305, 0, -90, -90) /R /B /F
Go P1
Go P3 CP ' Relay point
Go P2
Go P3 CP ' Relay point
Go P1
“Error: 4248” will occur again even the Manipulator is moved outside of the orange area
(Fig. 4) in PTP motion after “Error: 4248” occurred. In that case, the Manipulator is in
the red area (Fig. 2). Move the Manipulator from the area by moving the Joint #2 or #3
by Jog motion in Joint mode.
If the Manipulator moves at high speed, it will collide with itself after detecting “Error:
4248”.
Make sure to check the motion by simulator or motion in low power mode.

 Loading...
Loading...







