The speed setpoint of the drive is internally driven down an adjustable ramp (CS.DEC) to 0
V. With default values the output for the brake is switched on when the speed has reached
120 rpm (CS.VTHRESH) for at least 6 ms (CS.TO). The rise (t
brH
) and fall (t
brL
) times of the
holding brake that is built into the motor are different for the various types of motor (see motor
manual).
8.11 Feedback Connection
Every closed servo system normally requires at least one feedback device for sending actual
values from the motor to the drive. Depending on the type of feedback device used, infor-
mation will be fed back to the drive using digital or analog means.
AKD supports the most common types of feedback device. Two feedback devices can be
used at the same time, and all feedbacks are connected to X10. Feedback functions are
assigned with parameters in WorkBench, the setup software. Scaling and other settings are
also performed in WorkBench. For a detailed description of the parameters, please refer to
the WorkBench online help.
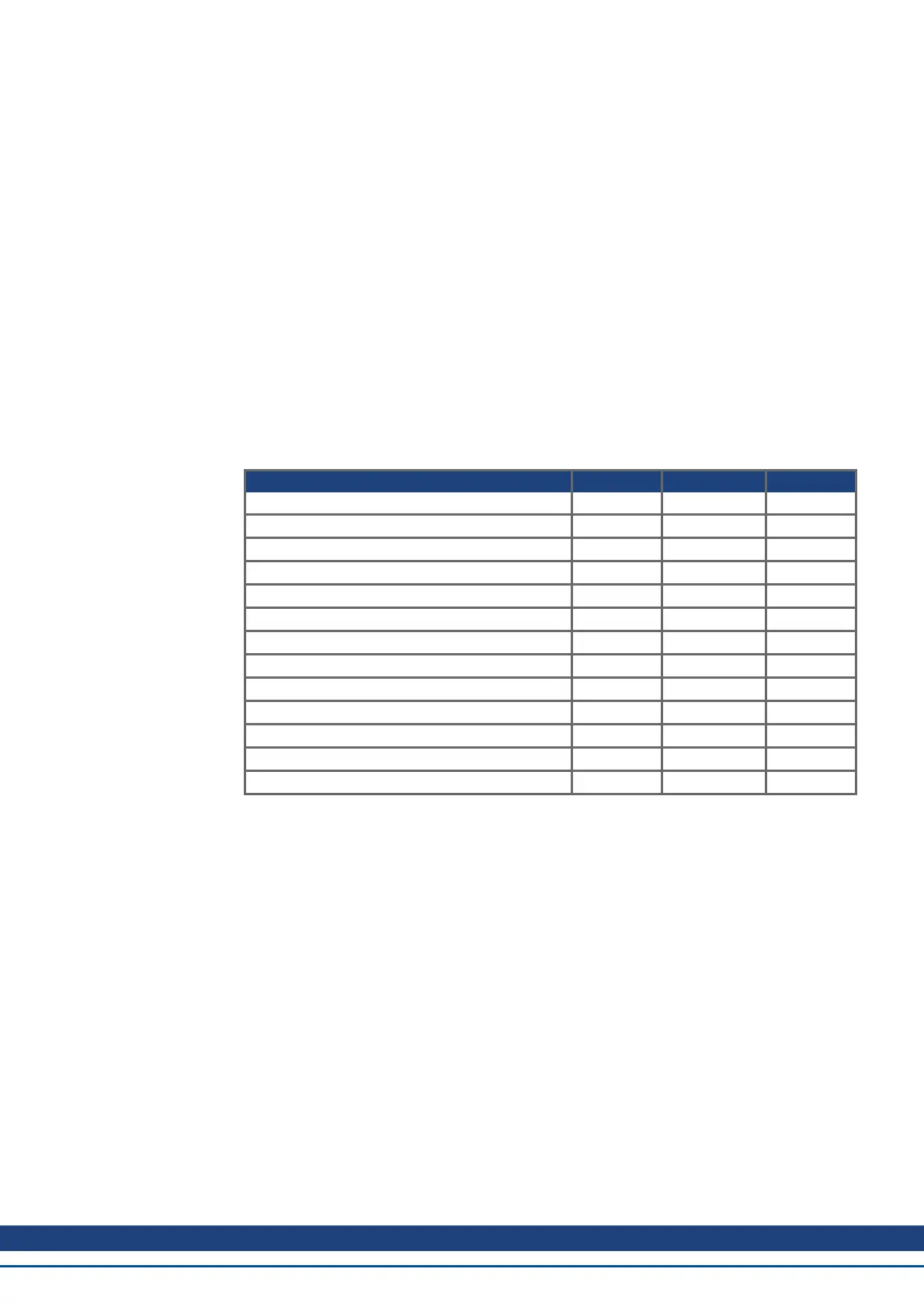
The table below provides an overview of the supported feedback types, their corresponding
parameters, and a reference to the relevant connection diagram in each case.
Feedback Types Wiring Connector FBTYPE
Resolver ➜ p. 105 X10 40
SFD ➜ p. 106 X10 41
Hiperface DSL ➜ p. 107 X10 46
SinCos Encoder BiSS A (analog) ➜ p. 108 X10 32
SinCos Encoder BiSS C (digital) ➜ p. 109 X10 34
SinCos Encoder ENDAT 2.1 ➜ p. 110 X10 30
SinCos Encoder ENDAT 2.2 ➜ p. 111 X10 31
Tamagawa Smart Abs ➜ p. 115 X10 42
SinCos Encoder Hiperface ➜ p. 112 X10 33
Sine Encoder + Hall ➜ p. 113 X10 20
Sine Encoder (Wake&Shake) ➜ p. 113 X10 21
Incremental Encoder + Hall ➜ p. 114 X10 10
Incremental Encoder (Wake&Shake) ➜ p. 114 X10 11
AKD Installation | 8 Electrical Installation
Kollmorgen™ | May 2013 103

 Loading...
Loading...







