Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23 1245
17 Function library
17.1 Function blocks
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
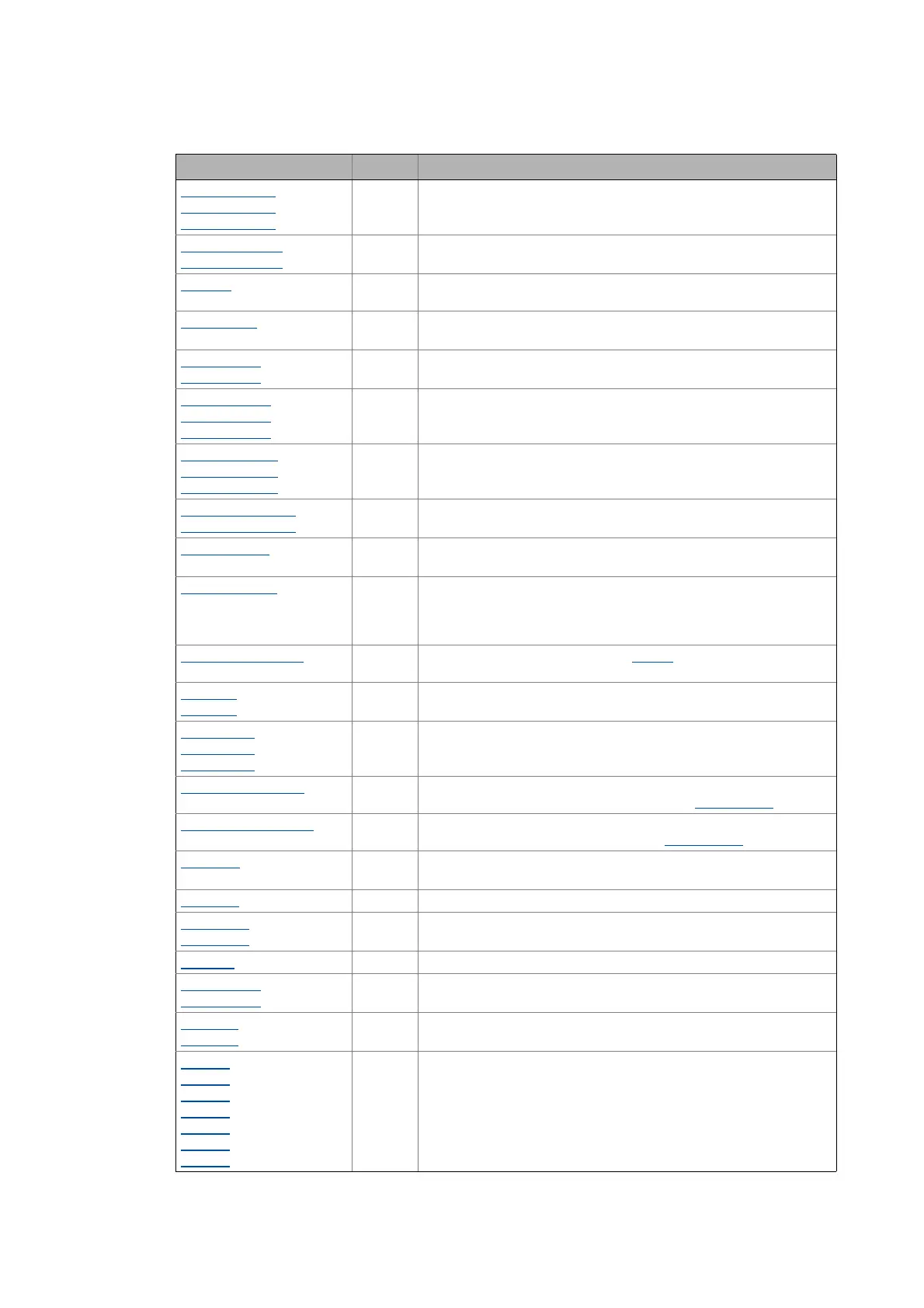
L_DigitalLogic_1
L_DigitalLogic_2
L_DigitalLogic_3
2 μs ... provides a binary output signal which is generated by the logic
combination of three input signals.
• L_DigitalLogic_3 is available from version 11.00.00.
L_DigitalLogic5_1
L_DigitalLogic5_2
2 μs ... provides a binary output signal which is generated by the logic
combination of five input signals.
L_DT1_1
3 μs ...differentiates signals. The function block can, for instance, be used to
apply an acceleration (dv/dt).
L_FixSet_a_1
2 μs ... outputs one of 16 parameterisable analog signals.
• This FB is available from version 04.00.00.
L_FixSet_w_1
L_FixSet_w_2
2 μs ... outputs one of 16 parameterisable data words.
• These FBs are available from version 04.00.00.
L_GainOffset_1
L_GainOffset_2
L_GainOffset_3
3 μs ... can amplify an analog input signal and then add an offset to it.
• Gain and offset can be set via FB inputs.
L_GainOffsetP_1
L_GainOffsetP_2
L_GainOffsetP_3
3 μs ... can amplify an analog input signal and then add an offset to it.
• Gain and offset can be set via parameters.
L_GainOffsetPhiP_1
L_GainOffsetPhiP_2
3 μs ... can amplify an angle signal and then add an offset to it.
• Gain and offset can be set via parameters.
L_GearComp_1
3 μs ... compensates elasticities in the drive train (gearbox compensation).
• This FB is available from version 11.00.00.
L_Interpolator_1
5 μs ... can interpolate a position setpoint and/or an analog value e.g. to
compensate for larger bus transmission cycles or to continue signal
characteristics if data telegrams are missing.
• This FB is available from version 04.00.00.
L_JogCtrlExtension_1
5 μs ... can be connected upstream to the L_NSet ramp generator to
implement a switch-off positioning at limit switch.
L_Limit_1
L_Limit_2
3 μs ... limits an analog input signal to an adjustable value range.
L_LimitPhi_1
L_LimitPhi_2
L_LimitPhi_3
3 μs ... limits an angle signal to an adjustable value range.
L_MckCtrlInterface_1
5 μs ... provides the application with process inputs for controlling various
basic functions of the Motion Control Kernel. MCKInterface
( 516)
L_MckStateInterface_1
5 μs ... provides the application with various items of status information of
the Motion Control via process outputs. MCKInterface
( 516)
L_MFail_1
0 μs ... can be used for implementing a mains failure control.
• This FB is available from version 14.00.00.
L_MPot_1
10 μs ... replaces a hardware motor potentiometer as setpoint source.
L_MulDiv_1
L_MulDiv_2
4 μs ... multiplies the analog input signal with a factor.
• Not remainder considered.
L_Mux_1
3 μs ... switches one of eight selectable input signals to the output.
L_Negation_1
L_Negation_2
2 μs ... negates an analog input signal.
L_NLim_1
L_NLim_2
3 μs ... can suppress up to three parameterisable blocking zones within a
continuous signal characteristic of an analog input signal.
L_Not_1
L_Not_2
L_Not_3
L_Not_4
L_Not_5
L_Not_6
L_Not_7
2 μs ... inverts a digital input signal.
Function block Runtime Function