7 Technology applications
7.3 TA "actuating drive speed (AC Drive Profile)"
424
Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.3.5 Process data assignment for fieldbus communication
The fieldbus communication is connected (preconfigured) to the previously selected technology
application by selecting the corresponding control mode in C00007
:
•"30: CAN
" for the connection to the system bus (CAN)
•"40: MCI
" for the connection to a plugged-in communication module (e.g. EtherNet/IP™)
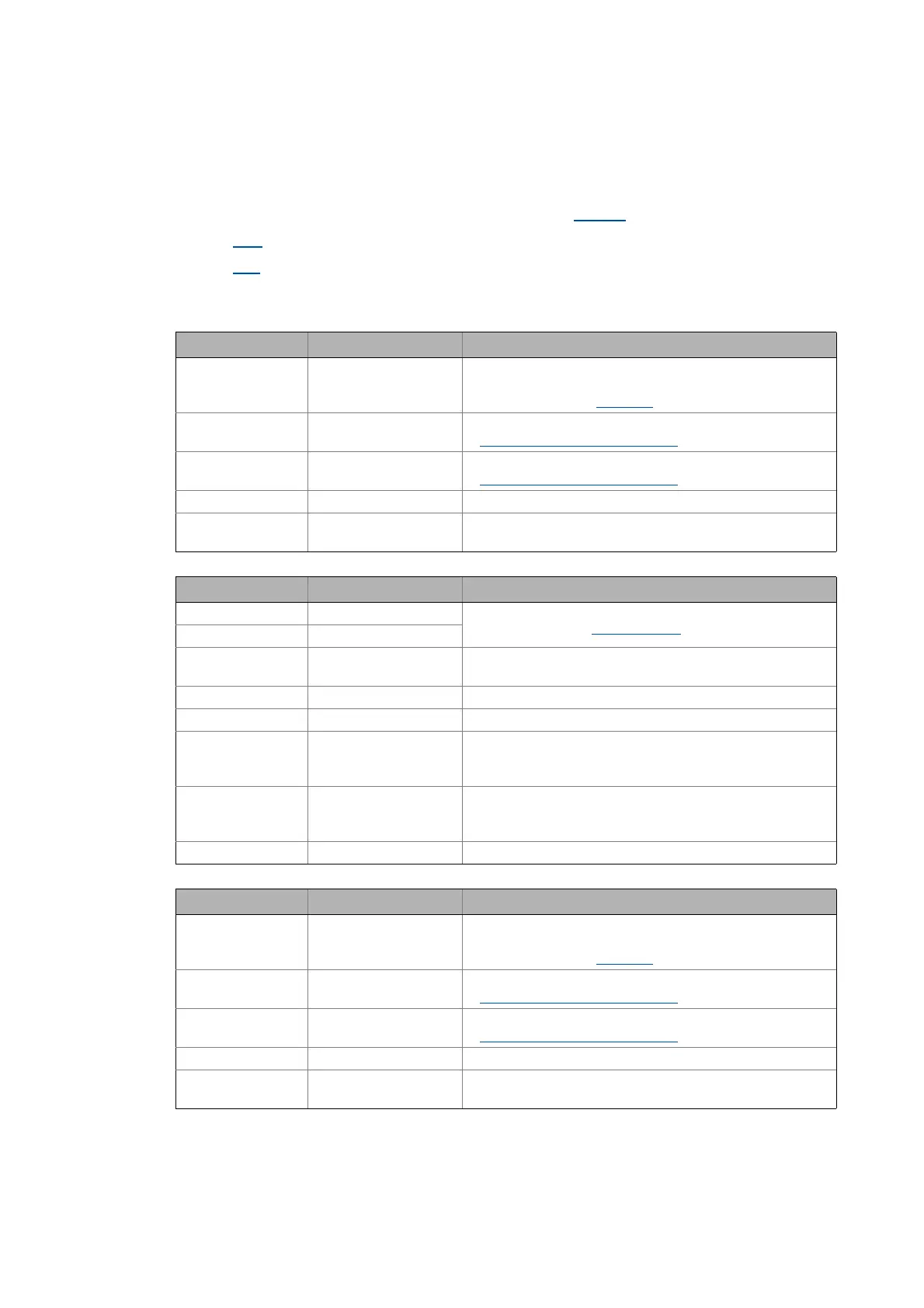
The assignment of the process data words depends only on the application, not on the bus system
used:
Input words Name Assignment
Word 1 DriveControl Control word
• For bit assignment see the table below.
• Display parameter: C01351/1
Word 2 SpeedReference Speed setpoint in [rpm]
Scaling of speed and torque values
Word 3 TorqueReference Torque setpoint in [Nm]
Scaling of speed and torque values
Word 4 - Not preconfigured
Words 5 ... 16 - Not preconfigured
• Only available in control mode "40: MCI".
Control word Name Function
Bit 0 Run Forward Relationships between Run1 and Run2 and trigger events can be
found in the chapter "Run/Stop event
".
Bit 1 Run Backward
Bit 2 Fault Reset 01 ≡ Reset error
0 ≡ No response
Bit 3 Reserved -
Bit 4 Reserved -
Bit 5 NetCtrl Run/Stop control:
0 ≡ via local setting in the device or terminal
1 ≡ via fieldbus (e.g. by the scanner)
Bit 6 NetRef Reference speed/reference torque:
0 ≡ via local setting in the device or terminal
1 ≡ via fieldbus (e.g. by the scanner)
Bit 7 ... 15 Reserved -
Output words Name Assignment
Word 1 DriveControlStatus Status word
• For bit assignment see the table below.
• Display parameter: C01352/1
Word 2 SpeedActual Actual speed value in [rpm]
Scaling of speed and torque values
Word 3 TorqueActual Actual torque in [Nm]
Scaling of speed and torque values
Word 4 - Not preconfigured
Words 5 ... 16 - Not preconfigured
• Only available in control mode "40: MCI".