7 Technology applications
7.4 TA "Table positioning"
460
Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
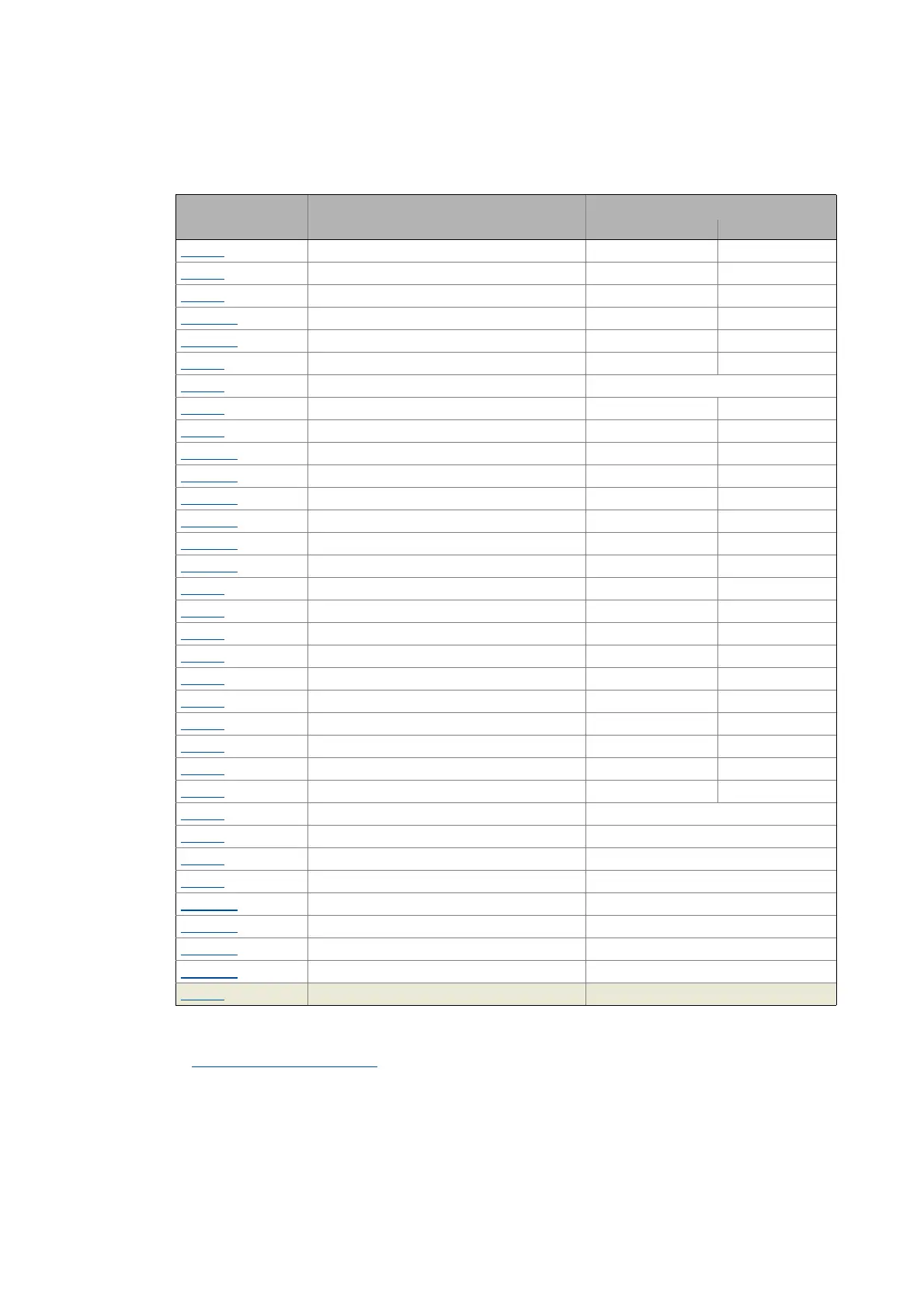
7.4.5 Setting parameters (short overview)
Related topics:
"GeneralPurpose" functions
( 491)
Parameters Info Lenze setting
Value Unit
C00012 Accel. time - main setpoint 2.000 s
C00013
Decel. time - main setpoint 2.000 s
C00024
LS_DriveInterface: bNActCompare 0.00 %
C00039/1
Fixed setpoint 1 40.00 %
C00039/2
Fixed setpoint 2 60.00 %
C00182
L_NSet_1: S-ramp time PT1 20.00 s
C00190
L_NSet_1: Setpoint arithmetic 0: Out = Set
C00220
L_NSet_1: Acceleration time - add. setpoint 0.000 s
C00221
L_NSet_1: Deceleration time - add. setpoint 0.000 s
C00632/1
L_NSet_1: Blocking speed 1 max 0.00 %
C00632/2
L_NSet_1: Blocking speed 2 max 0.00 %
C00632/3
L_NSet_1: Blocking speed 3 max 0.00 %
C00633/1
L_NSet_1: Blocking speed 1 min 0.00 %
C00633/2
L_NSet_1: Blocking speed 2 min 0.00 %
C00633/3
L_NSet_1: Blocking speed 3 min 0.00 %
C00635
L_NSet_1: nMaxLimit 199.99 %
C00636
L_NSet_1: nMinLimit -199.99 %
C00670
L_OffsetGainP_1: Gain 1.0000
C00671
L_OffsetGainP_2: Gain 1.0000
C00696
L_OffsetGainP_1: Offset 0.00 %
C00697
L_OffsetGainP_2: Offset 0.00 %
C00800
L_MPot_1: Upper limit 100.00 %
C00801
L_MPot_1: Lower limit -100.00 %
C00802
L_MPot_1: Acceleration time 10.0 s
C00803 L_MPot_1: Deceleration time 10.0 s
C00804
L_MPot_1: Inactive fct. 0: Retain value
C00805
L_MPot_1: Init fct. 0: Load last value
C00806 Use of motor potentiometer 0: No
C01297
L_MckStateInterface_1: Alternative function Bit coded
C01298/1
MCK operating mode at profile no. 0 1: Follower
C01298/2
MCK operating mode at profile no. 1 2: Homing
C01298/3
MCK operating mode at profile no. 2 3: ManualJog
C01298/4
MCK operating mode at profile no. 3...15 4: Positioning
C01299 MCKI: Status MCKInterface -