Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23 1414
17 Function library
17.1 Function blocks | L_MFail_1
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
17.1.102.6 Fine adjustment of the mains failure control
For the fine adjustment, repeat the following points several times:
1. A final speed as low as possible has to be reached before the inverter reaches the operating
threshold for undervoltage (LU):
• Increase proportional gain Vp in C01469/1
.
•Reduce Vdc-bus controller reset time in C01470/1
.
2. The responding of the braking unit or the reaching of the operating threshold for overvoltage
(OU) has to be prevented:
• Increase Vdc controller reset time in C01470/1
until the ideal profile shown in [17-47] will be
almost reached.
• If required, reduce the nDCSet_a voltage setpoint to which the DC-bus voltage is to be
controlled (in the interconnection example via the free parameter C00476/2
).
3. Increasing the deceleration time or reducing the braking torque is only possible to a limited
extent:
•Increasing the acceleration time in C01470/2
reduces the initial braking torque and
simultaneously increases the deceleration time.
• Increasing the Vdc controller reset time in C01470/1
reduces the braking torque and
simultaneously increases the deceleration time. If the reset times are too high, the inverter
reaches the operating threshold for undervoltage (LU) before standstill is reached. Hence, the
drive is not controlled anymore.
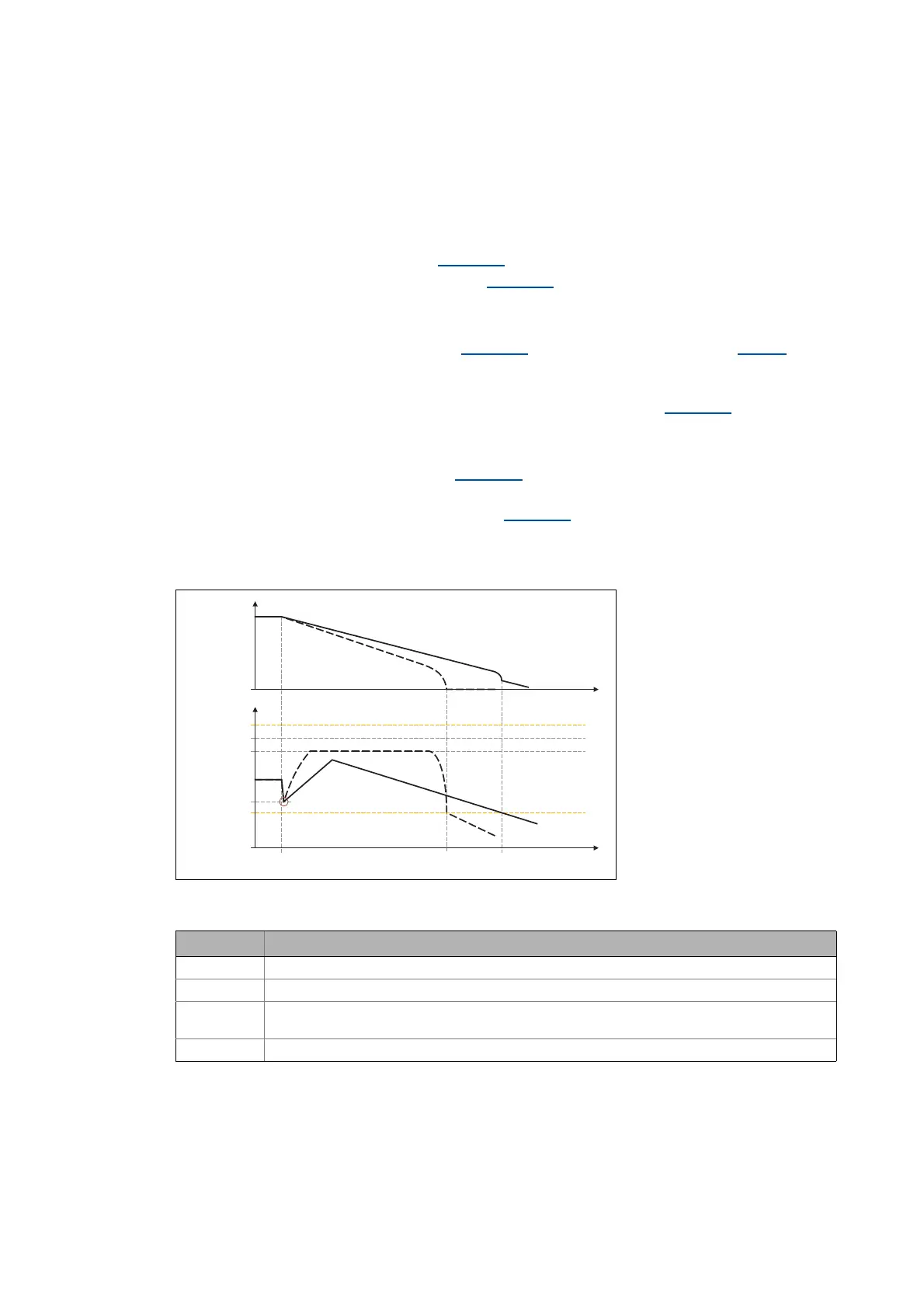
[17-48] Schematic diagram with different braking torques
n = speed of the drive
Operating threshold OU
Switch-on threshold - braking unit
Operating threshold - mains failure
Operating threshold LU
n
t
t
UG
0
1
2
3
t1 t2 t3
L_Compare_3.bOut
0
0
nDcSet_a
Point in time Info
t = t1 Mains failure
t = t2 Speed "0" with higher braking torque reached (short reset time).
t = t3 With a lower braking torque (higher reset time), the drive reaches the operating threshold for
undervoltage (LU) without reaching speed "0".
t > t3 Drive is not controlled anymore (is braked by friction).