17 Function library
17.1 Function blocks | L_PhaseDiff_1
1469
Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
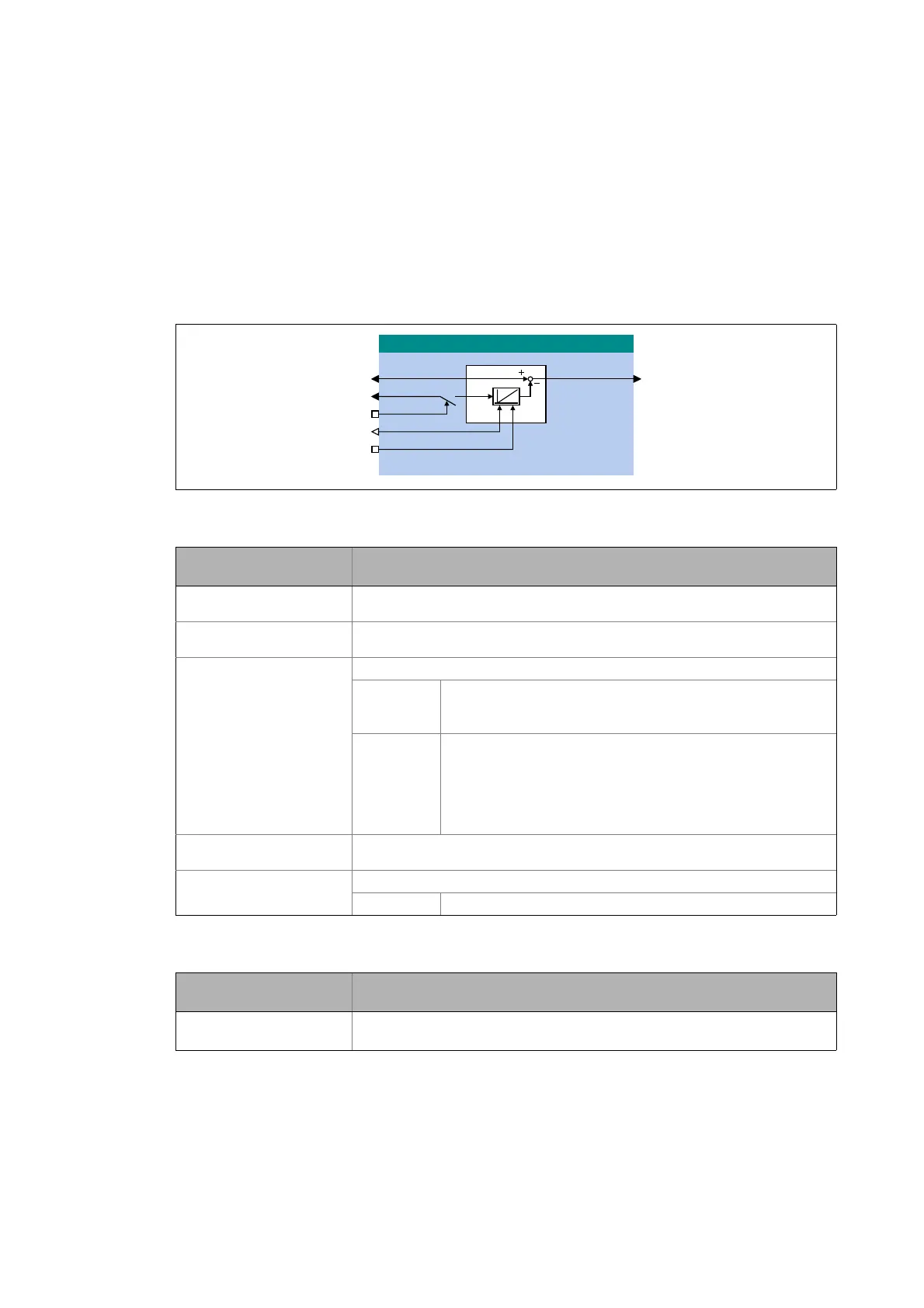
17.1.135 L_PhaseDiff_1
This FB generates a position difference for the specified position setpoint from a position value and
a speed signal.
• In an integrator, the nIn_v speed signal is integrated into a position value and subtracted from
the dnSet_p position setpoint.
• In addition, the adaptive dnAdd_p position value can be added to the integrator content by
setting bEn to TRUE.
Inputs
Outputs
Designator
Data type
Information/possible settings
dnSet_p
DINT
Selection of a position setpoint
dnAdd_p
DINT
Adaptive position value for the actual position
bEn
BOOL
Activate addition of the adaptive position value
FALSE 1.The speed signal at nIn_v is integrated by the angle integrator.
2.The result of the angle integrator is subtracted from the angle
signal at dnSet_p and output at dnOut_p afterwards.
TRUE The adaptive position value selected via dnAdd_p is added:
1.The speed signal at nIn_v is integrated by the angle integrator.
2.The angle signal at dnAdd_p is added to the integrated speed
signal in every task cycle.
3.The result of the angle integrator is subtracted from the angle
signal at dnSet_p and output at dnOut_p afterwards.
nIn_v
INT
Selection of the actual speed to be converted into the position value
bReset
BOOL
Reset actual angle integrator
TRUE Actual angle integrator is set to "0".
Designator
Data type
Value/meaning
dnOut_p
DINT
Output angle signal (position difference)
• Without limitation
/B3KDVH'LIIB
GQ2XWBSGQ6HWBS
GQ$GGBS
E(Q
E5HVHW
Q,QBY