5 Motor control (MCTRL)
5.7 Sensorless vector control (SLVC)
200
Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Speed controller reset time Ti
Apart from setting the P component, C00071/1
provides the possibility to take influence on the I
component of the PI controller.
Tip!
Value range recommended by Lenze for the setting of the reset time:
Ti = 20 ms … 150 ms
5.7.4.3 Optimising dynamic performance and field weakening behaviour
In the Lenze setting, the torque controller has been preset in such a way that robust and stable
operation with a moderate dynamic response is enabled over the entire speed range. Retrospective
optimisation of the controller parameters is not necessary.
A greater dynamic performance of the sensorless vector control can be achieved by reducing time
constant Ti of the speed controller (C00074/2
).
A greater dynamic performance of the field weakening function can be achieved by setting a time
constant ≤ 15 ms. This means for actual speeds above rated speed a better torque-speed-
characteristic in the field weakening range:
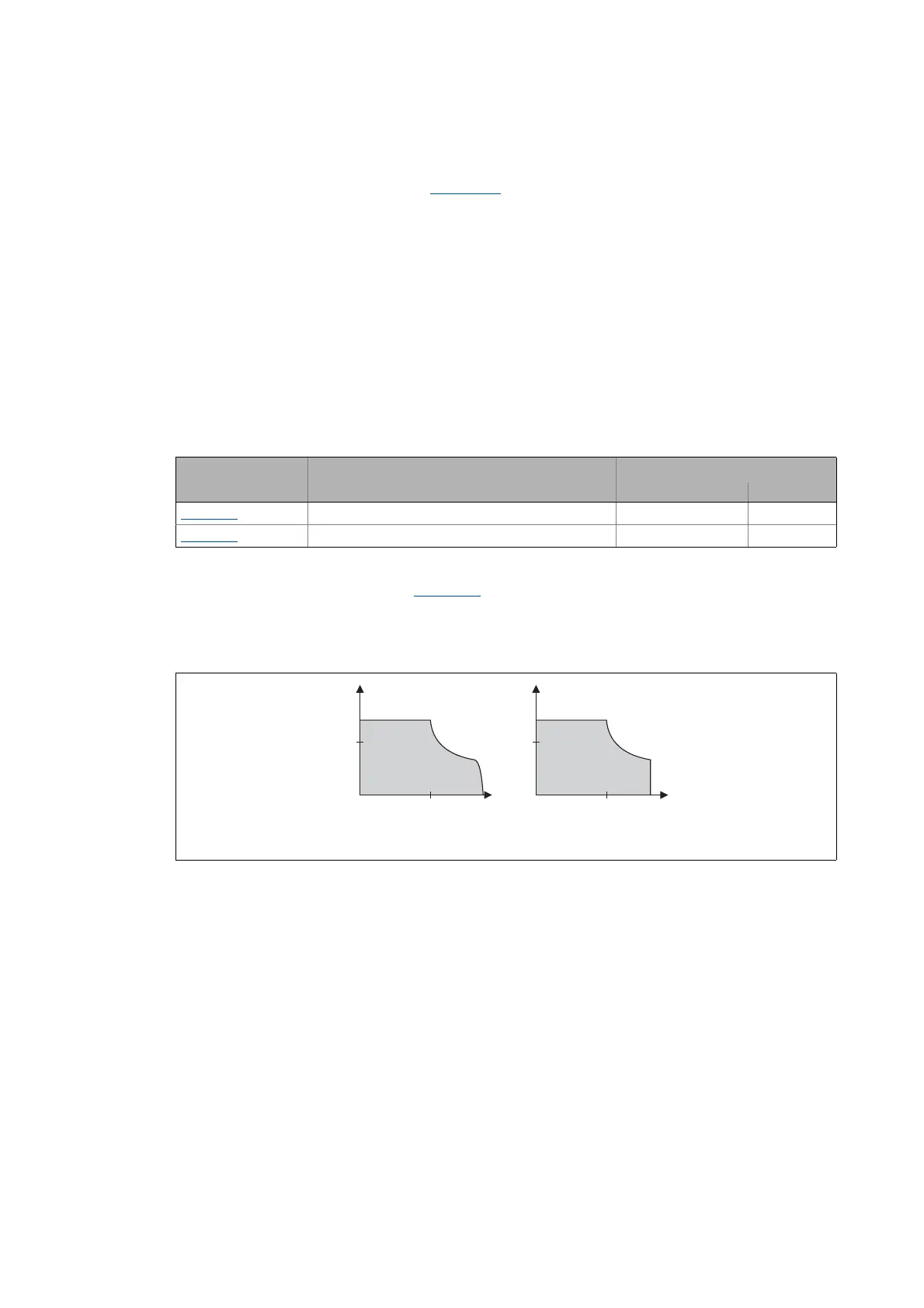
[5-11] Speed / torque characteristic diagram in the field weakening range
• For Ti >15ms (see ), the actual speed value slightly drops in the field weakening range if the
load torque increases in the motor mode.
•For Ti ≤ 15 ms (see ), the speed remains stable in the field weakening range if the torque is
within the M/n characteristic field highlighted in grey.
Tip!
For applications with high dynamic performance and speed/torque accuracy requirements
in the field weakening range, we recommend a time constant Ti ≤ 15 ms.
In this case, the maximum torque should be limited via the nTorqueMotLimit_a and
nTorqueGenLimit_a process input signals to 1.5 x M
N
to ensure stable operation in the field
weakening range.
Parameters Info Lenze setting
Value Unit
C00073/2 SLVC: Vp torque controller 1.25
C00074/2
SLVC: Ti torque controller 30 ms
Torque controller time constant Ti > 15 ms
Torque controller time constant Ti ≤ 15 ms