Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23 507
8 Basic drive functions (MCK)
8.2 Internal interfaces | System block "LS_MotionControlKernel"
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
8.2.2 MCK status word
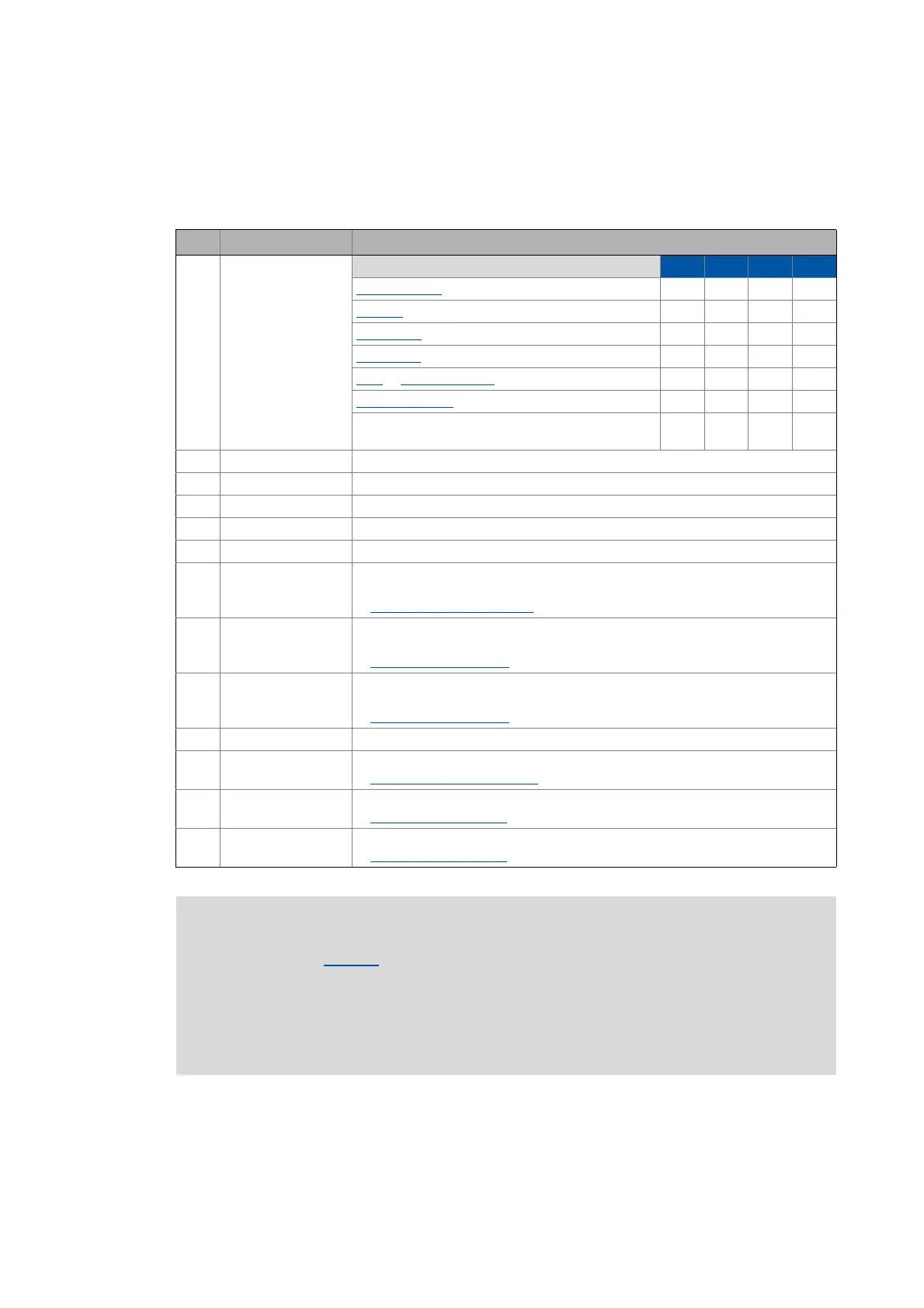
MCK status word 1 (wMotionState1)
Bit Designation Description
0
...
3
ActOpModeBit00
...
ActOpModeBit03
Active operating mode Bit 3 Bit 2 Bit 1 Bit 0
Speed follower
0000
Homing
0001
Manual jog
0010
Positioning
0011
Stop
or Safe stop 1 (SS1) 0100
Position follower 0101
StandBy (internal operating mode in the event of
quick stop, pulse inhibit, and DC-injection braking)
1111
4Busy "1" ≡ Internal profile generation is active. A speed profile is being generated.
5Done "1" ≡ Generation of a speed profile with the selected position has been completed.
6 AcceleratingActive "1" ≡ Profile generation phase is in the acceleration process.
7 ConstSpeedDuty "1" ≡ Profile generation phase at constant speed active.
8 DeceleratingActive "1" ≡ Profile generation phase is in the deceleration process.
9S_ShapingActive From version 12.00.00:
"1" ≡ Rounding during acceleration/deceleration active.
Status bit "S_ShapingActive"
10 Pos. HW-Limit
Detected
"1" ≡ Positive limit switch has triggered.
• Reset only possible via"Manual jog" mode!
Hardware limit switches
11 Neg. HW-Limit
Detected
"1" ≡ Negative limit switch has triggered.
• Reset only possible via"Manual jog" mode!
Hardware limit switches
12 HomPosDone "1" ≡ Homing has been completed.
13 HomPosAvailable "1" ≡ The home position has been detected and is known in the drive.
Status bit "HomPosAvailable"
14 Pos. SW limit
detected
"1" ≡ Positive software limit position overtravelled.
Software limit positions
15 Neg. SW limit
detected
"1" ≡ Negative software limit position overtravelled.
Software limit positions
Note!
The internal "StandBy" operating mode is assumed if controller inhibit, pulse inhibit,
quick stop and/or DC-injection braking are activated.
• In this operating mode, no setpoint generation takes place through the Motion
Control Kernel.
• If the holding brake control sets a controller inhibit when the holding brake is closed,
the internal "StandBy" operating mode is not assumed.