4 Device control (DCTRL)
4.2 Device state machine and device states
120
Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.8 TroubleQSP
This device status will be active as soon as a monitoring mode responds the error response
"TroubleQSP" has been parameterised for.
• The drive is decelerated to standstill with torque within the deceleration time parameterised for
quick stop independently of the defined setpoint and can be kept there.
• The device status can only be abandoned by acknowledging the error if the error cause is
removed.
• When the controller is inhibited, it is possible to jump to the "SwitchedOn
" status even during
the error status since the controller inhibit function has a higher priority. As long as the error is
pending and has not been acknowledged, the status is changed back to the "TroubleQSP" status
when the controller is enabled afterwards.
Depending on certain conditions a status change takes place based on the "TroubleQSP" device
status.
Related topics:
wCANControl/wMCIControl control words
( 129)
Basics on error handling in the inverter
( 623)
Error messages of the operating system
( 647)
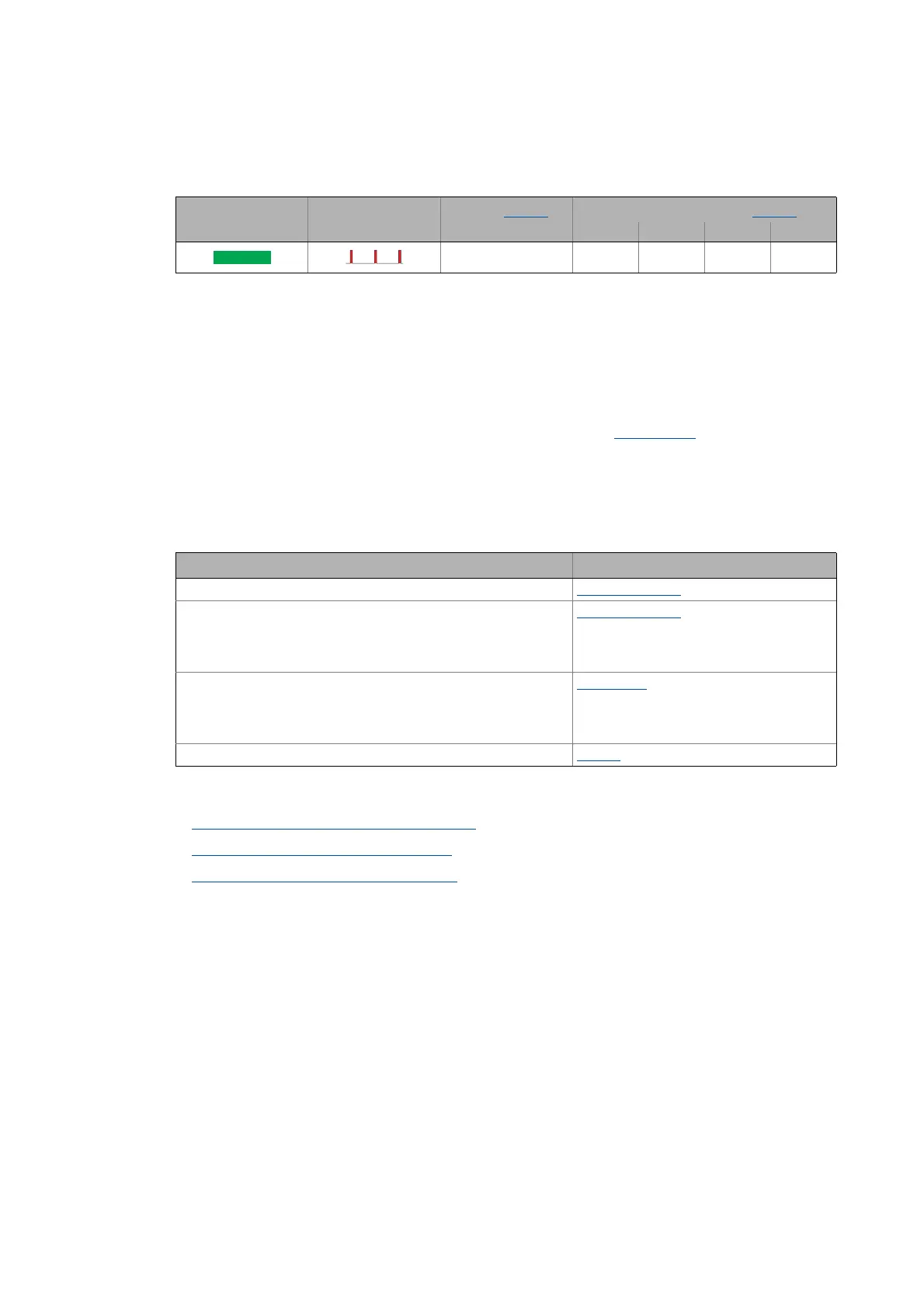
"DRV-RDY" LED LED "DRV-ERR" Display in C00137 Display in status word 1 (C00150)
Bit 11 Bit 10 Bit 9 Bit 8
TroubleQSP 1001
Change condition Changeover to the device status
Control bit "SwitchOn" of a control channel = "0". ReadyToSwitchOn
Control bit "EnableOperation" of all control channels = "1"
AND terminal RFR = HIGH level (controller enable)
AND error is reset by the control bit "ResetFault"
AND no more errors are pending.
OperationEnabled
Control bit "EnableOperation" of a control channel = "0"
OR terminal RFR = LOW level (controller inhibit)
AND error is reset by the control bit "ResetFault"
AND no more errors are pending.
SwitchedOn
A message is active in the system. Trouble