Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23 587
8 Basic drive functions (MCK)
8.8 Positioning
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
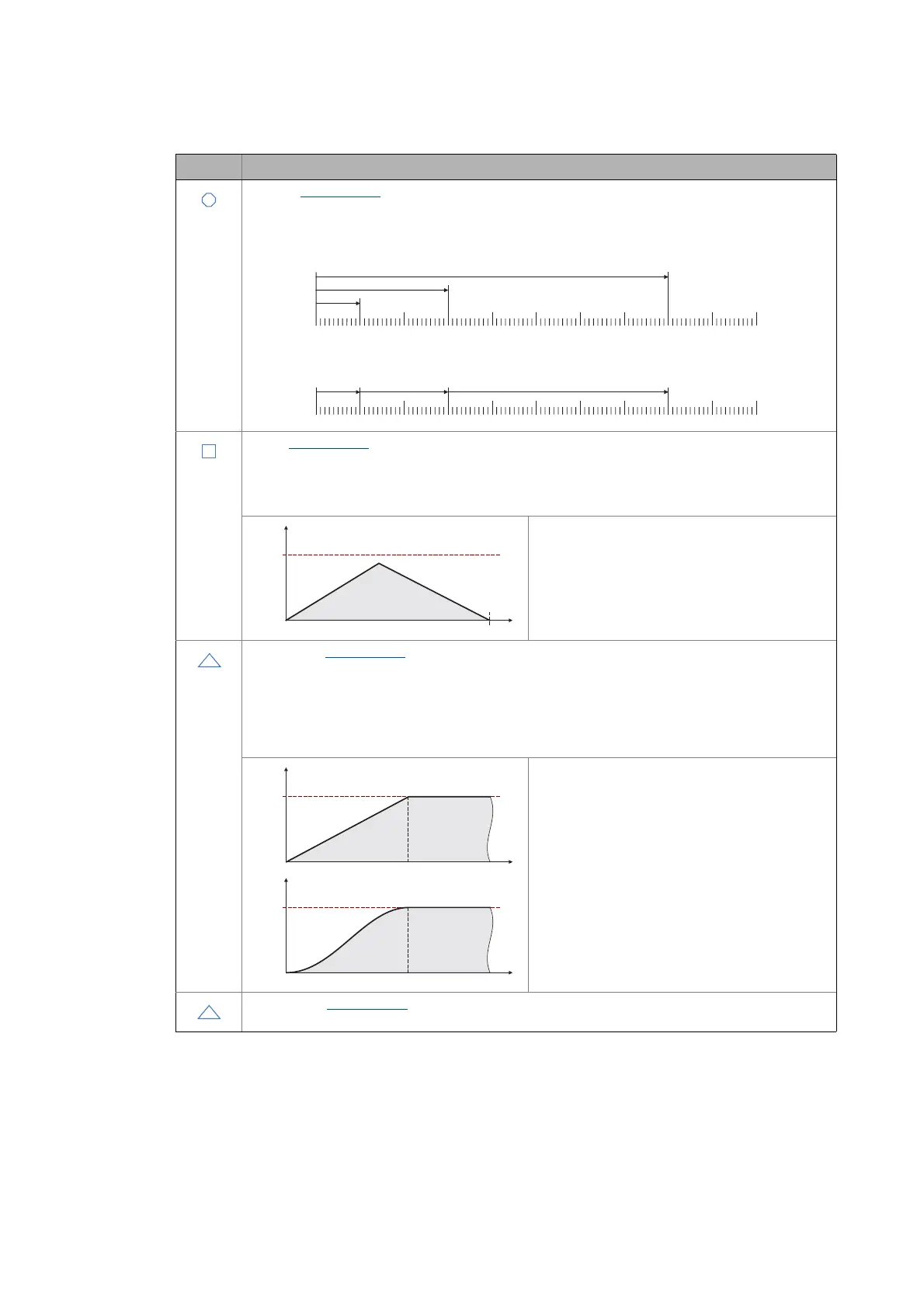
Position (C01301/1...15)
Target position or distance to be traversed.
When the position is indicated, a distinction is made between absolute position and relative position:
• An absolute position always indicates the distance to the defined zero position:
Absolute position = Target position
• A relative position indicates the distance to the starting position (current position):
Relative position = Target position - Starting position
Speed (C01302/1...15
)
Maximum velocity during the positioning process.
• Depending on the profile parameters of position, acceleration and deceleration , it is possible that
the drive will not even reach the maximum speed. In this case, the graphic representation will be a
trapezium instead of a triangle:
Acceleration
Travelling speed (is not reached in this case)
Deceleration
Target position (or traversing distance)
Acceleration (C01303/1...15
)
Maximum acceleration during the positioning process.
• Two types of acceleration are distinguished:
• Constant acceleration: the velocity increases linearly.
• Linearly increasing acceleration: Speed increases in S-shape.
A linearly increasing acceleration (S-profile) results from the setting of an S-ramp time (see more
below).
Constant acceleration (L-profile)
Linearly increasing acceleration (S-profile)
Deceleration (C01304/1...15
)
Maximum deceleration during the positioning process.
Symbol Profile parameters
10 20 30 40 50 60 70 80 90 100
10
30
80
P1
P2
P3
0
10 20 30 40 50 60 70 80 90 100
10
20 50
P3P2P1
0
v
pos
v
pos
v[unit/s]
v[unit/s]
t [s]
t [s]