5.7 H: Terminal Functions
YASKAWA ELECTRIC SIEP C710616 35D YASKAWA AC Drive E1000 Technical Manual 187
For example, if an external fault signal is input to terminal S3, “EF3” will be displayed.
Select the value to be set in H1- from a combination of any of the following three conditions:
• Signal input level from peripheral devices (N.O., N.C.)
• External fault detection method
• Operation after external fault detection
The following table shows the relationship between the conditions and the value set to H1-:
Setting 30: PI Integral Reset
By configuring one of the digital inputs for PI integral reset (H1- = 30), the value of the integral component in PI
control will be reset to 0 whenever the terminal is closed. Refer to PI Block Diagram on page 147 for more details.
Setting 31: PI Integral Hold
By configuring a digital input for Integral Hold (H1-0 = 31), the value of the integral component of the PI control is
locked as long as the input is active. The PI controller resumes integral operation from the hold value as soon as the
integral hold input is released. Refer to PI Block Diagram on page 147 for more information on this function.
Setting 34: PI Soft Starter Cancel
A digital input configured as a PI soft starter cancel input (H1-0 = 34) can be used to enable or disable the PI soft
starter and thereby canceling the PI accel/decel time (b5-17). Refer to PI Block Diagram on page 147.
Setting 35: PI Input Level Selection
Allows and input terminal to switch the sign of the PI input. Refer to PI Block Diagram on page 147 for details.
Setting 36: External Reference 1/2 Selection 2
This function can be used to switch the Run command and frequency reference source between External reference 1 and
2 if the drive is in the REMOTE mode.
Note: With default settings the drive is not to allow switching between External reference 1 and 2 during run. Refer to b1-07: LOCAL/
REMOTE Run Selection on page 135 if this feature is required by the application.
Setting 40, 41: ForwarD Run, Reverse Run Command for 2-wire Sequence
Configures the drive for a 2-wire sequence.
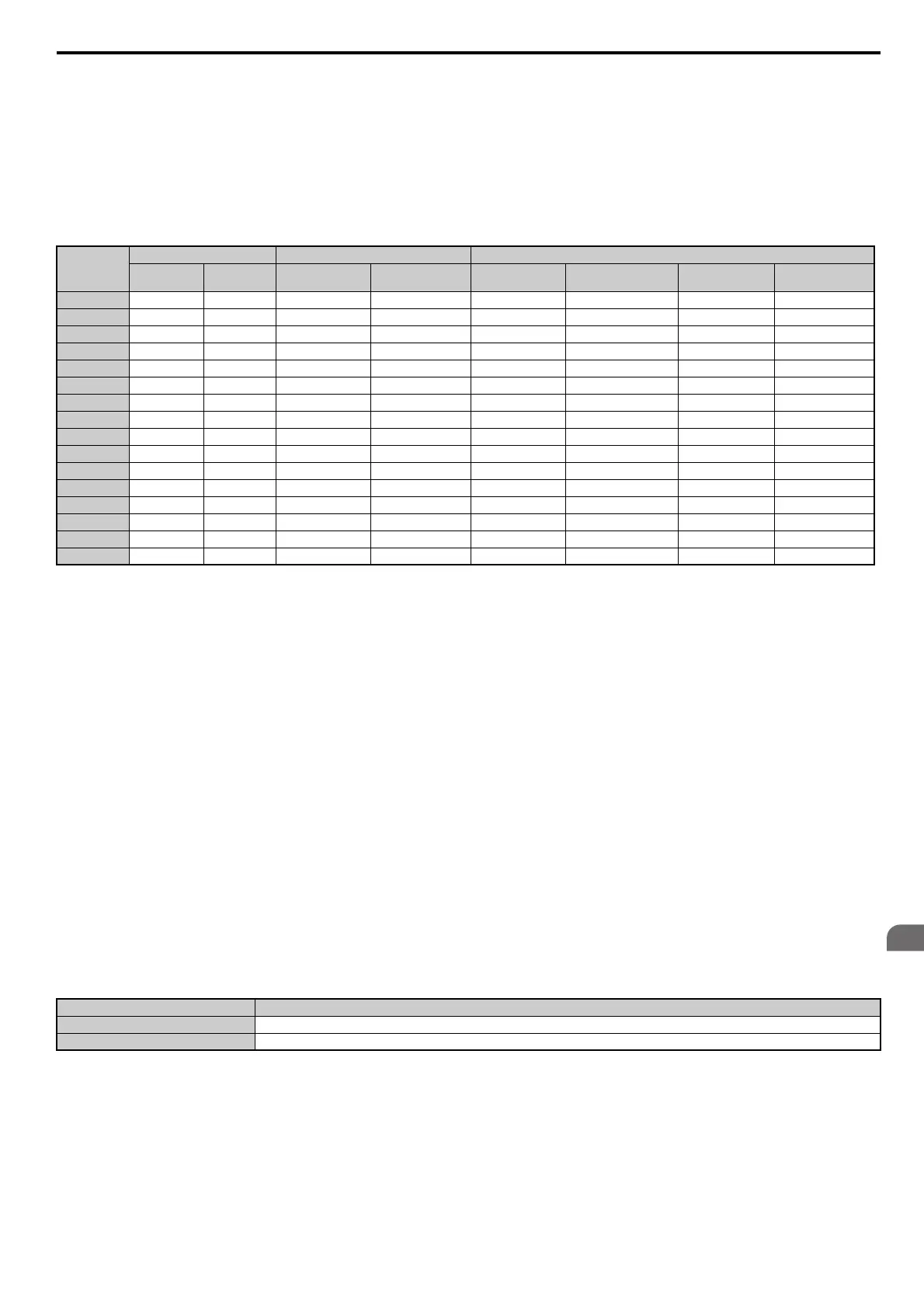
Setting
<1> Determine the terminal status for each fault, i.e., whether the terminal is normally open or normally closed.
<2> Determine whether detection for each fault should be enabled only during run or always detected.
Terminal Status <1> Detection Conditions <2> Stopping Method
N.O. N.C. Always Detected
Detected during
Run only
Ramp to Stop
(fault)
Coast to Stop
(fault)
Fast Stop
(fault)
Alarm Only
(continue running)
20 O – O – O – – –
21 – O O – O – – –
22 O – – O O – – –
23 – O – O O – – –
24 O – O – – O – –
25 – O O – – O – –
26 O – – O – O – –
27 – O – O – O – –
28 O – O – – – O –
29 – O O – – – O –
2A O – – O – – O –
2B – O – O – – O –
2C O – O – – – – O
2D – O O – – – – O
2E O – – O – – – O
2F – O – O – – – O
Status Description
CLOSED Run command and frequency reference source 1 (determined by b1-01 and b1-02)
OPEN Run command and frequency reference source 2 (determined by b1-15 and b1-16)
SIEP_C710616_35.book 187 ページ 2015年11月30日 月曜日 午後2時2分