Menus 15 to 17
SM-Uni Enc Pl
Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance
Feature look-
up table
232 Unidrive SP Advanced User Guide
www.controltechniques.com Issue Number: 7
Any baud rate can be used when encoder comms is used with a SINCOS encoder to obtain the absolute position during initialisation. When encoder
comms is used alone the time taken to obtain the comms position must be 160µs or less.
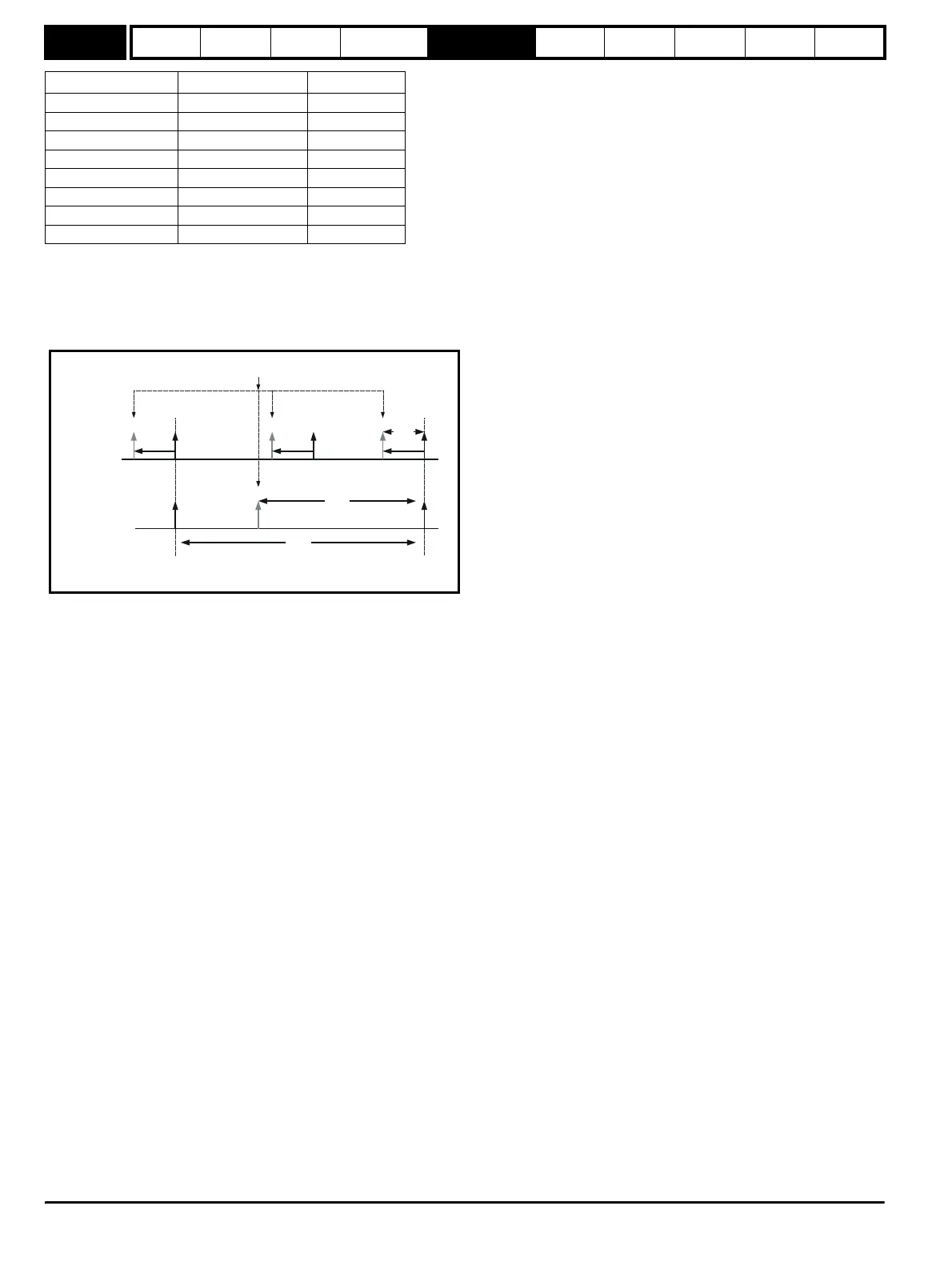
There is a delay associated with obtaining the position from an encoder using comms alone to transmit the position. The length of this delay affects
the sample rate and timing of the position used by the drive for control. If the position within one turn can be obtained in 30µs and the whole comms
message including CRC (if appropriate) can be obtained in 60µs then fast sampling is used, otherwise slow sampling is used as shown below. In
each case the encoder position is sampled by the encoder at the start of the comms message.
In the example the current/torque sampling rate is 4kHz, but this will change if a different switching frequency is selected. If fast sampling is used the
control position used to define the drive reference frame is obtained every current/torque control sample. If slow sampling is used the control position
is obtained 200µs before the datum. When fast sampling is used the delay introduced into the control system by the encoder is less, and so a higher
control system bandwidth will be possible. So that the position values from the encoder can be used in a position control system, compensation is
provided for the delay in obtaining the position so that it appears to have been sampled at the datum. This compensation is based on the delay (i.e.
20µs or 200µs) and the change of position over the previous sample (between the last two datum points).
EnDat comms
The following equations are used by the Solutions Module to determine the time taken to obtain the position information from an EnDat encoder.
These are based on t
cal
≤ 5µs, where t
cal
is the time from the first clock edge of the position command message from the drive to the first clock edge
when the encoder responds as defined in the EnDat specification. This limit of 5µs may exclude a small number of EnDat encoders from being used
by the drive as a comms only feedback device. It is also assumed that t
D
≤ 1.25µs where t
D
is the data delay from the encoder as defined by the
EnDat specification for 105m of cable. This value would be significantly less for shorter cable distances. It should be noted that all values are rounded
up to the nearest microsecond.
Command message time = t
command
= 10T or t
cal
whichever is the longest
Where: T = 1/Baud Rate, t
cal
= 5µs
Time for single turn position = t
command
+ t
D
+ (2 + Single turn resolution) x T
= t
command
+ t
D
+ (2 + Pr x.11) x T
Where: t
D
= 1.25µs
Time for whole message including CRC = Time for single turn position + (Number of turns bits + 5) x T
= Time for single turn position + (Pr x.09 + 5) x T
For example an encoder with 12 turns bits, 13 bit single turn resolution and a baud rate of 2M would give the following times:
Time for single turn position = 14µs (13.75µs rounded up)
Time for the whole message including CRC = 23µs (22.25µs rounded up)
SSI comms
The whole position must be obtained from an SSI encoder before it can be used by the Solutions Module, therefore the time for the single turn
position and the time for the whole message are the same. It is also assumed that t
D
≤ 1.25µs where t
D
is the data delay from the encoder for 105m
of cable. This value would be significantly less for shorter cable distances. It should be noted that all values are rounded up to the nearest
microsecond.
Time to obtain the position = ((Number of turns bits + Single turn resolution + 1) x T) + t
D
= ((Pr x.09 + Pr x.11 + 1) x T) + t
D
For example an encoder with 12 turns bits, 13 bit single turn resolution and a baud rate of 1M would give the following time:
Time to obtain the position data = 28µs (27.25µs rounded up)
Parameter value Parameter string Baud rate
0 100 100k
1 200 200k
2 300 300k
3 400 400k
4 500 500k
5 1,000 1M
6 1,500 1.5M
7 2,000 2M
Slow
Sampling
Fast
Sampling
250 s
µ
Datum
Point
Datum
Point
200 s
µ
20 s
µ
Start of comms messages and encoder position sampling point
http://nicontrols.com