Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance
Feature look-
up table
Menu 3
All modes
Unidrive SP Advanced User Guide 71
Issue Number: 7 www.controltechniques.com
At power-up Pr 3.48 is initially zero, but is set to one when the drive encoder and any encoders connected to position category modules have been
initialised. The drive cannot be enabled until this parameter is one.
If an encoder trip occurs (Enc1 to Enc17) and the encoder requires re-initialisation this parameter is set to zero and the drive cannot be enabled.
When the trip is reset the encoder is initialised and this parameter is automatically set to one.
When this parameter is set to one, additional information for the motor object can be transferred from Pr 18.11 to Pr 18.17 as shown below.
If Pr 3.50 is set to one Pr 3.28, Pr 3.29 and Pr 3.30 are not updated. If this parameter is set to zero these parameters are updated normally.
Communication with Hiperface and EnDat encoders
It is possible to use the communications channel between the drive and a Hiperface or EnDat encoder. This allows access to the encoder functions
including reading the encoder position and, reading and writing to encoder memory. The system can be used to communicate with SC.Hiper and
SC.EnDat type encoders provided that the position checking system has been disabled, by setting Pr 90.21 to one.
To send a message to the encoder the required message must be written to the transmit register (Pr 90.22). To read the response from the encoder
the data is read from the receive register (Pr 90.23).
Bits 13-15 of the registers are used to indicate the following:
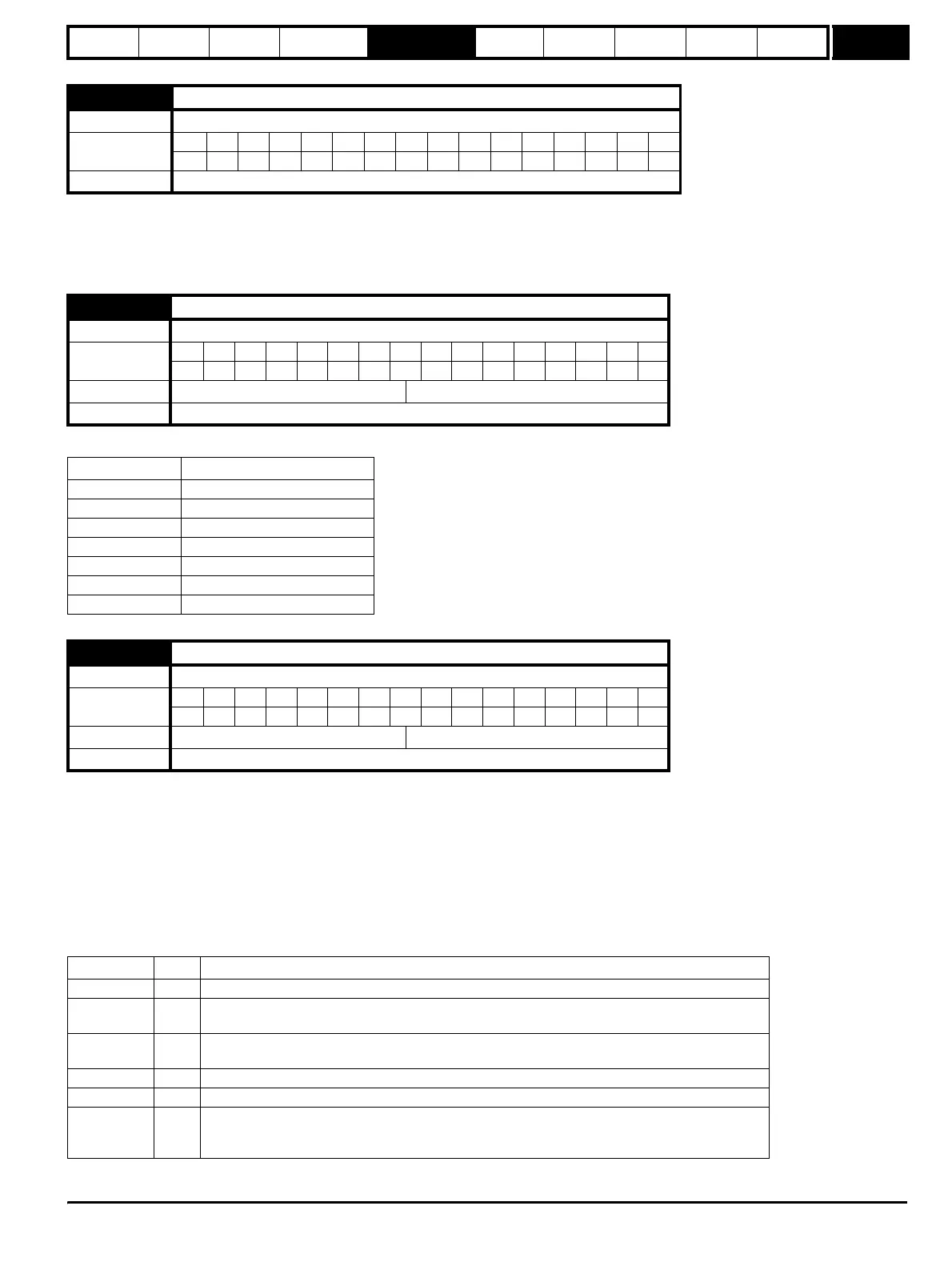
3.48 Position feedback initialised
Drive modes Open-loop, Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1 111
Update rate Background write
3.49 Full motor object electronic nameplate transfer
Drive modes Open-loop, Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
111
Default Open-loop, Closed-loop vector, Servo 0
Update rate Read on reset
User parameter Motor object parameter
Pr 18.11 Motor object version number
Pr 18.12 Motor type (MSW)
Pr 18.13 Motor type (LSW)
Pr 18.14 Motor manufacturer
Pr 18.15 Motor serial number (MSW)
Pr 18.16 Motor serial number
Pr 18.17 Motor serial number (LSW)
3.50 Position feedback lock
Drive modes Open-loop, Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
11
Default Open-loop, Closed-loop vector, Servo 0
Update rate 4ms read
Register Bit Function
Transmit 15 Must be set for the drive to transfer the LS byte to the comms buffer.
Transmit 14
The LS byte is the last byte of the message and this byte should be put in the comms buffer and be
transferred to the encoder.
Transmit 13
The LS byte is the first byte of the message. (If this is used the buffer pointer is reset to the start of
the buffer.)
Receive 15 Indicates data from the last transfer can be read from the receive buffer.
Receive 14 The byte in the LS byte is the last byte of the receive message
Receive 13
There is no data in the receive buffer and the LS byte is the comms system status. If there was an
error in the received message this will always be set and one of the status error bits will be set until
the comms is used again by this system or by the drive.
http://nicontrols.com