Menu 3
All modes
Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance
Feature look-
up table
74 Unidrive SP Advanced User Guide
www.controltechniques.com Issue Number: 7
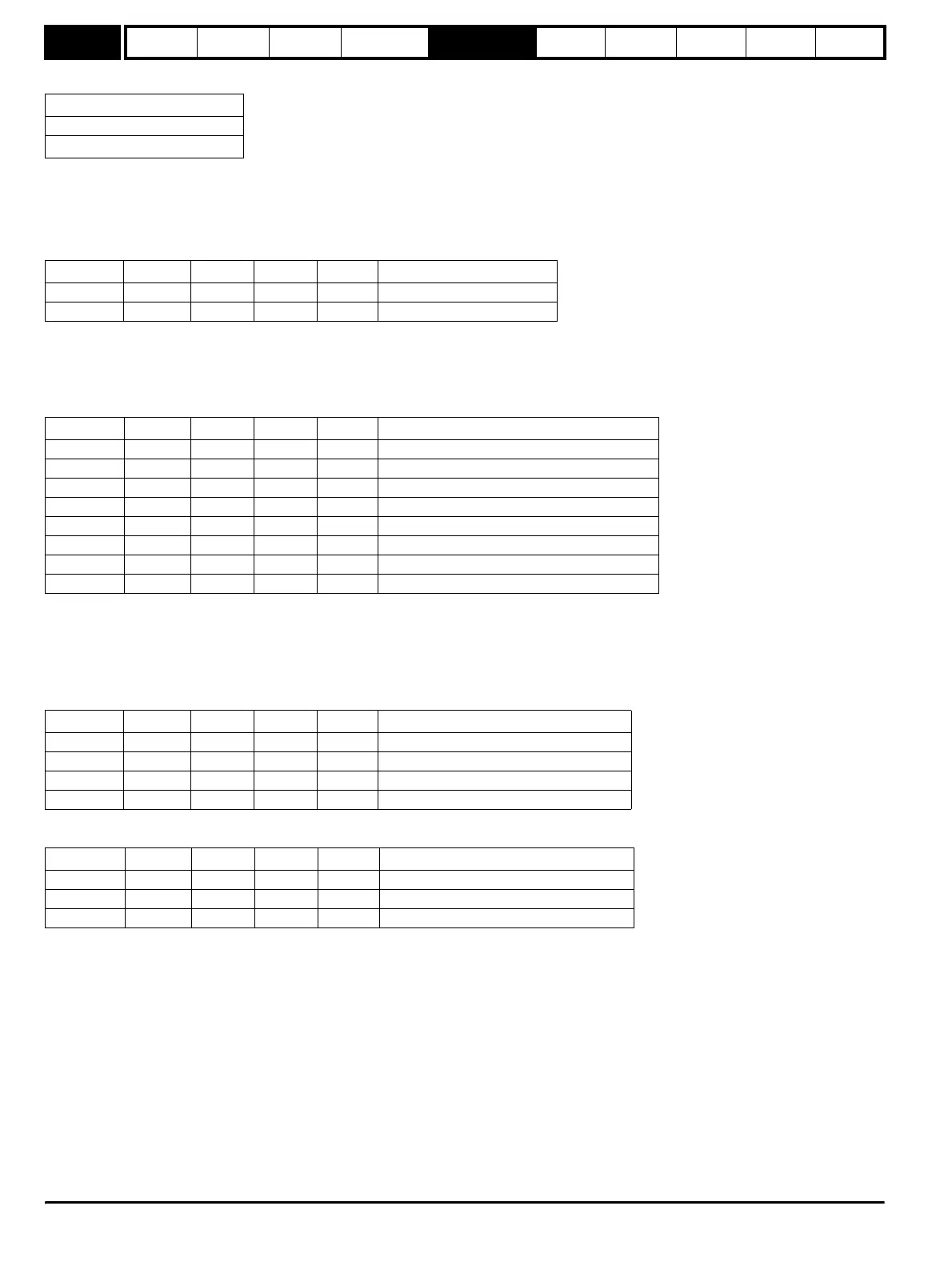
If any other command is used then the response is as follows (encoder to drive).
Example of EnDat transfer: Read position
Disable drive encoder position check by setting Pr 90.21 to one. This should be set back to zero at the end of the transfer if encoder position checking
is required.
Transfer the "read position" message to the encoder comms buffer by writing the sequence of words shown in the table below to Pr 90.22. A check
should be carried out before each word is written to ensure that the parameter is zero (i.e. the drive has taken any previous data).
The second word contains the address which is not required for the command, but has been passed to the drive so that a word with bit 14 set to one
is received by the drive to initiate the data transfer to the encoder. When the encoder response has been received by the drive the first byte of the
message will be placed in the least significant byte of Pr 90.23 and bit 15 will be set to one. This data should be read and the parameter cleared so
that the drive will put the next byte into this parameter. The sequence of data that could appear in Pr 90.23 for an encoder with 12 turns bits and 13
position bits is shown in the table below.
Turns = 0111 0100 0100 = 0x744
Position = 1 1101 0011 1110 = 0x1d3e
Alarm bit = 0
Example of EnDat transfer: Encoder send parameter
Data written to Pr 90.22
Data read from Pr 90.23
The data is the parameter at address zero is 0x1234.
Address
1
st
byte
Data (LSB)
Data (MSB)
3
rd
byte
Bit 15 Bit 14 Bit 13 Data
0xa000 1 0 1 0x00 Read position command
0xc000 1 1 0 0x00 Address
Bit 15 Bit 14 Bit 13 Data
0x8000 1 0 0 0x00
0x8000 1 0 0 0x00
0x8000 1 0 0 0x00
0x8000 1 0 0 0x00
0x8000 1 0 0 0x00 Bit7 = bit 0 of position, Bit6 = alarm bit
0x809f 1 0 0 0x9f Bits 8-1 of position
0x804e 1 0 0 0x4e Bits 3-0 of turns and 12-9 of position
0xc074 1 1 0 0x74 Bits 11-4 of turns
Bit 15 Bit 14 Bit 13 Data
0xa003 1 0 1 0x03 Encoder to send parameter command
0x8000 1 0 0 0x00 Address zero
0x8000 1 0 0 0x00 Data (not required)
0xc000 1 1 0 0x00 Data (not required)
Bit 15 Bit 14 Bit 13 Data
0x8000 1 0 0 0x00 Address
0x8012 1 0 0 0x12 Data
0x8034 1 1 0 0x34 Data
http://nicontrols.com