Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance
Feature look-
up table
Menu 4
Unidrive SP Advanced User Guide 97
Issue Number: 7 www.controltechniques.com
Regen
The defaults Kp and Ki gains should be suitable for the standard regen inductors. If the input inductance is significantly higher the gains should be
adjusted as described for the Closed-loop vector and Servo modes. See Pr 3.06 on page 77 for guidelines on setting the regen unit current controller
gains.
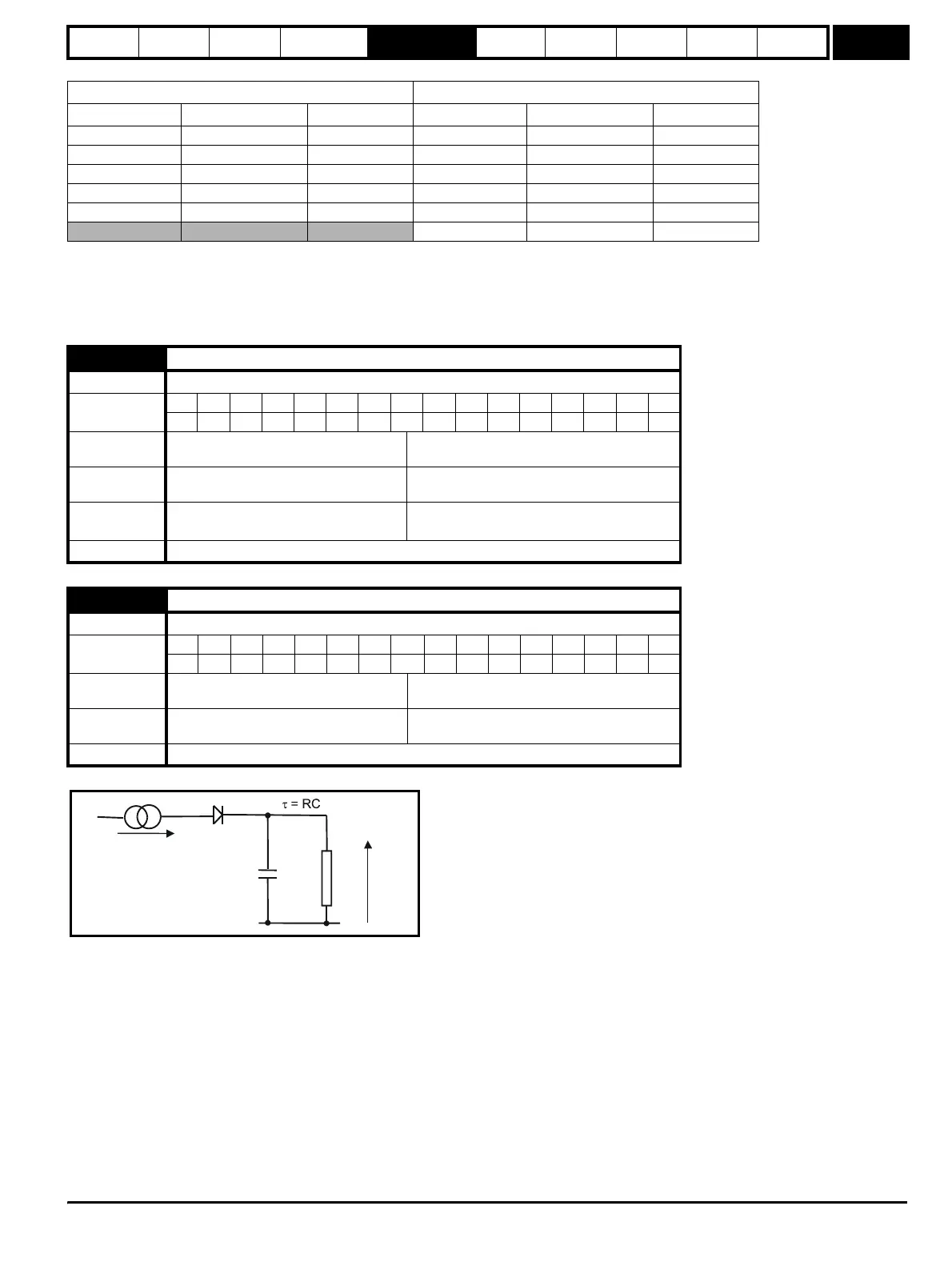
The motor is modelled thermally in a way that is equivalent to the electrical circuit shown as follows.
The temperature of the motor as a percentage of maximum temperature, with a constant current magnitude of I, constant value of K and constant
value of motor rated current (set by Pr 5.07 or Pr 21.07) after time t is given by
Temp = [I
2
/ (K x Motor rated current)
2
] (1 - e
-t/τ
) x 100%
This assumes that the maximum allowed motor temperature is produced by K x Motor rated current and that τ is the thermal time constant of the point
in the motor that reaches its maximum allowed temperature first. τ is defined by Pr 4.15. The estimated motor temperature is given by Pr 4.19 as a
percentage of maximum temperature. If Pr 4.15 has a value between 0.0 and 1.0 the thermal time constant is taken as 1.0.
If the rated current (defined by Pr 5.07 or Pr 21.07 depending on which motor is selected) is less or equal to the maximum Heavy Duty rating then
Pr 4.25 can be used to select 2 alternative protection characteristics (see diagram below). If Pr 4.25 is 0 the characteristic is for a motor which can
operate at rated current over the whole speed range. Induction motors with this type of characteristic normally have forced cooling. If Pr 4.25 is 1 the
characteristic is intended for motors where the cooling effect of motor fan reduces with reduced motor speed below half of rated speed. The maximum
value for K is 1.05, so that above the knee of the characteristics the motor can operate continuously up to 1.05% current. (In Regen mode K = 1.05
over the whole operating frequency range.)
Unidrive Unidrive SP
Switching freq Proportional gain Integral gain Switching freq Proportional gain Integral gain
3kHz Pr 4.13 x 0.5 Pr 4.14 3kHz Pr 4.13 Pr 4.14
4.5kHz Pr 4.13 x 0.75 Pr 4.14 4kHz Pr 4.13 x 1.5 Pr 4.14
6kHz Pr 4.13 Pr 4.14 6kHz Pr 4.13 x 2 Pr 4.14
9kHz Pr 4.13 x 0.75 Pr 4.14 8kHz Pr 4.13 x 2 Pr 4.14 x 1.3
12kHz Pr 4.13 Pr 4.14 12kHz Pr 4.13 x 2.6 Pr 4.14 x 1.3
16kHz Pr 4.13 x 2 Pr 4.14 x 1.3
4.15 Thermal time constant
Drive modes Open-loop, Closed-loop vector, Servo, Regen
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
111
Range
Open-loop, Closed-loop vector, Servo,
Regen
0.0 to 400.0
Default
Open-loop, Closed-loop vector, Regen
Servo
89.0
20.0
Second motor
parameter
Open-loop, Closed-loop vector, Servo,
Regen
Pr 21.16
Update rate Background read
4.16 Thermal protection mode
Drive modes Open-loop, Closed-loop vector, Servo, Regen
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1111
Range
Open-loop, Closed-loop vector, Servo,
Regen
0 to 1
Default
Open-loop, Closed-loop vector, Servo,
Regen
0
Update rate Background read
(I /(K*Motor Rated Current)
22
Temp
C
R
http://nicontrols.com