Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance
Feature look-
up table
Menu 4
Unidrive SP Advanced User Guide 91
Issue Number: 7 www.controltechniques.com
Open-loop
The motoring current limit applies in either direction of rotation when the machine is producing motoring torque. Similarly the regen current limit
applies in either direction when the machine is producing regenerating torque. The symmetrical current limit can override either motoring or
regenerating current limit if it is set at a lower value than either limit.
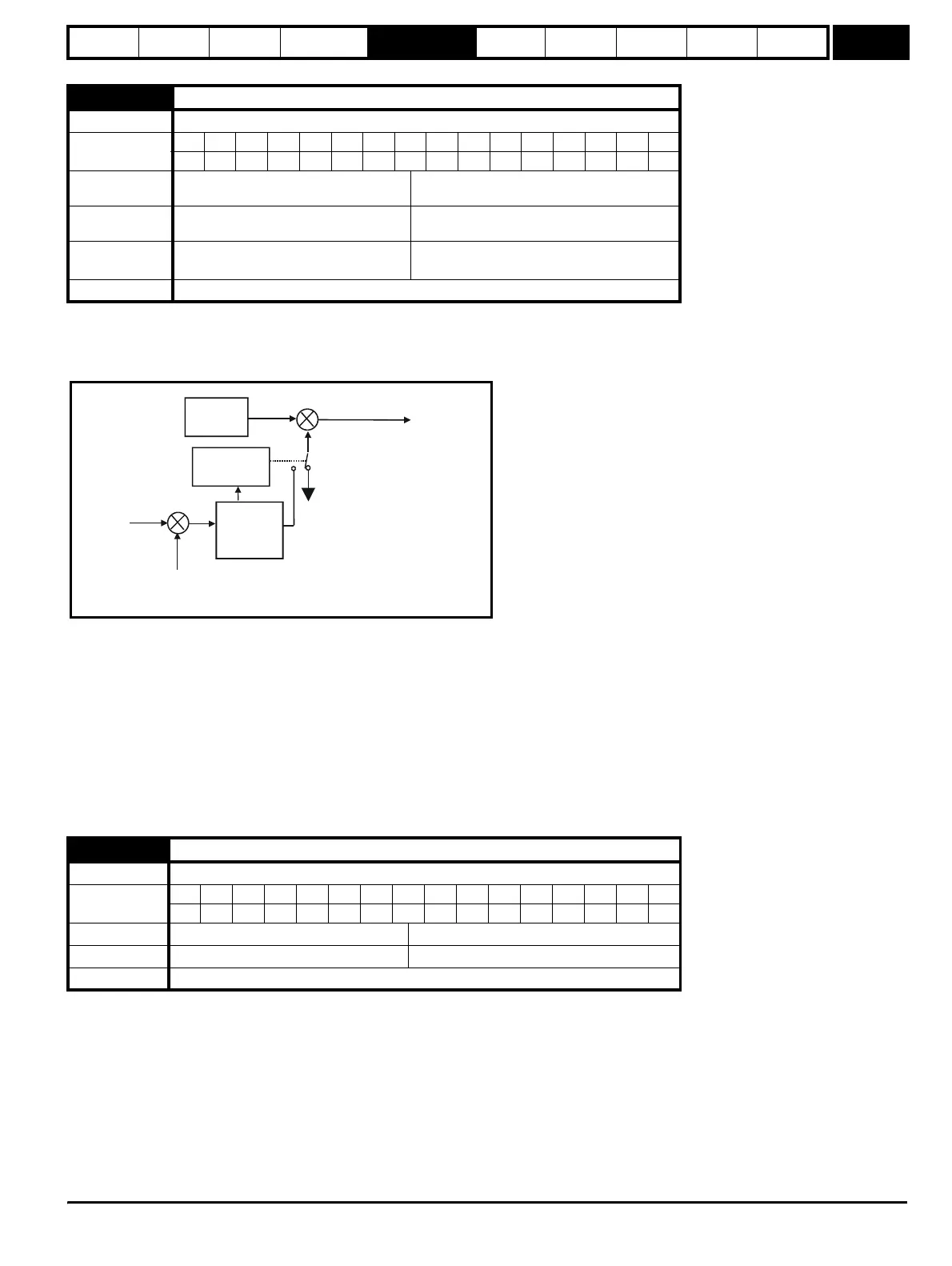
The current limits are compared with the active current and if the current exceeds a limit the error value passes through the PI controller to give a
frequency component which is used to modify the ramp output. The direction of the modification is always to reduce the frequency to zero if the active
current is over the motoring limit, or to increase the frequency towards the maximum if the current is over the regenerating limit. Even when the
current limit is active the ramp still operates, therefore the proportional and integral gains (Pr 4.13 and Pr 4.14) must be high enough to counter the
effects of the ramp. See Pr 4.13 and Pr 4.14 on page 95 for gain setting.
Closed-loop vector and Servo
The motoring current limit applies in either direction of rotation when the machine is producing motoring torque. Similarly the regen current limit
applies in either direction when the machine is producing regenerating torque. The symmetrical current limit can override either motoring or
regenerating current limit if it is set at a lower value than either limit.
Regen
Current limits are provided in regen mode, however, if the current limits are active the DC bus voltage can no longer be controlled.
4.07 Symmetrical current limit
Drive modes Open-loop, Closed-loop vector, Servo, Regen
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
11 1 111
Range
Open-loop, Closed-loop vector, Servo,
Regen
0 to MOTOR1_CURRENT_LIMIT_MAX %
Default
Open-loop
Closed-loop vector, Servo, Regen
165.0
175.0
Second motor
parameter
Open-loop, Closed-loop vector, Servo Pr 21.29
Update rate Background read
4.08 Torque reference
Drive modes Open-loop, Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
12 11
Range Open-loop, Closed-loop vector, Servo ±USER_CURRENT_MAX %
Default Open-loop, Closed-loop vector, Servo 0.00
Update rate 4ms read
Kp Pr
4.13
Ki Pr
4.14
Current limit
active
1
0
current
limit
Post ram
reference
Ramp
Active
current
-
+
http://nicontrols.com