Menus 15 to 17
SM-Resolver
Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance
Feature look-
up table
250 Unidrive SP Advanced User Guide
www.controltechniques.com Issue Number: 7
When an SM-Resolver is fitted the user parameter menu for the module contains all the parameters for a position feedback category Solutions
Module. However, all parameters are not used by this Solutions Module. In the descriptions below only the parameters used by the module are
described.
The update time for some functions are affected by the number of dumb option modules fitted to the drive. The update time for these functions is the
sum of the update times for all dumb option modules fitted to the drive, called the combined update time. The update time for the SM-Encoder plus
and SM-resolver modules is 4ms, and the update time for the SM-I/O plus is 8ms.
For example, if a module with 4ms update time and a module with 8ms are fitted to the drive, then the combined update time for the time critical
parameters of each module is 12ms.
If the module is selected for motor control the position feedback can be used as the reference or feedback source for the position controller within the
drive or with any application within a SM-Applications module. However, if the module is not selected for motor control the speed (Pr x.03 is always
zero), and the maximum speed must be limited depending on the option module combined update time so that the resolver position does not change
by more than half an electrical revolution within the sample period. Therefore
Maximum speed (rpm) <0.5 x 60 / Combined update time / (Resolver poles / 2)
e.g with a combined update time of 4ms and a 2 pole resolver the maximum speed is 7500rpm. If this maximum speed is exceeded the resolver
position and freeze position will be incorrect.
Position/speed feedback update rate
If the module is selected for motor control position feedback then the position and speed parameters are updated as defined with each parameter, but
are available within the drive at a faster rate as shown below.
If the module is not selected for motor control position feedback the position and speed are updated as defined with the appropriate parameters.
When no Solutions Module is fitted in the relevant slot this parameter is zero. When a module is fitted this parameter displays the identification code
of the module as shown below.
When parameters are saved by the user in the drive EEPROM the option code of the currently fitted module is saved in EEPROM. If the drive is
subsequently powered-up with a different module fitted, or no module fitted where a module was previously fitted, the drive gives a Slot.dF trip. The
menu for the relevant slot appears for the new module category with the default parameter values for the new category. The new parameters values
are not stored in EEPROM until the user performs a parameter save.
Control position Current controller sample rate
Control speed 250µs
Position controller position (menu 13) 4ms
Position for SM-Applications module, etc. 250µs
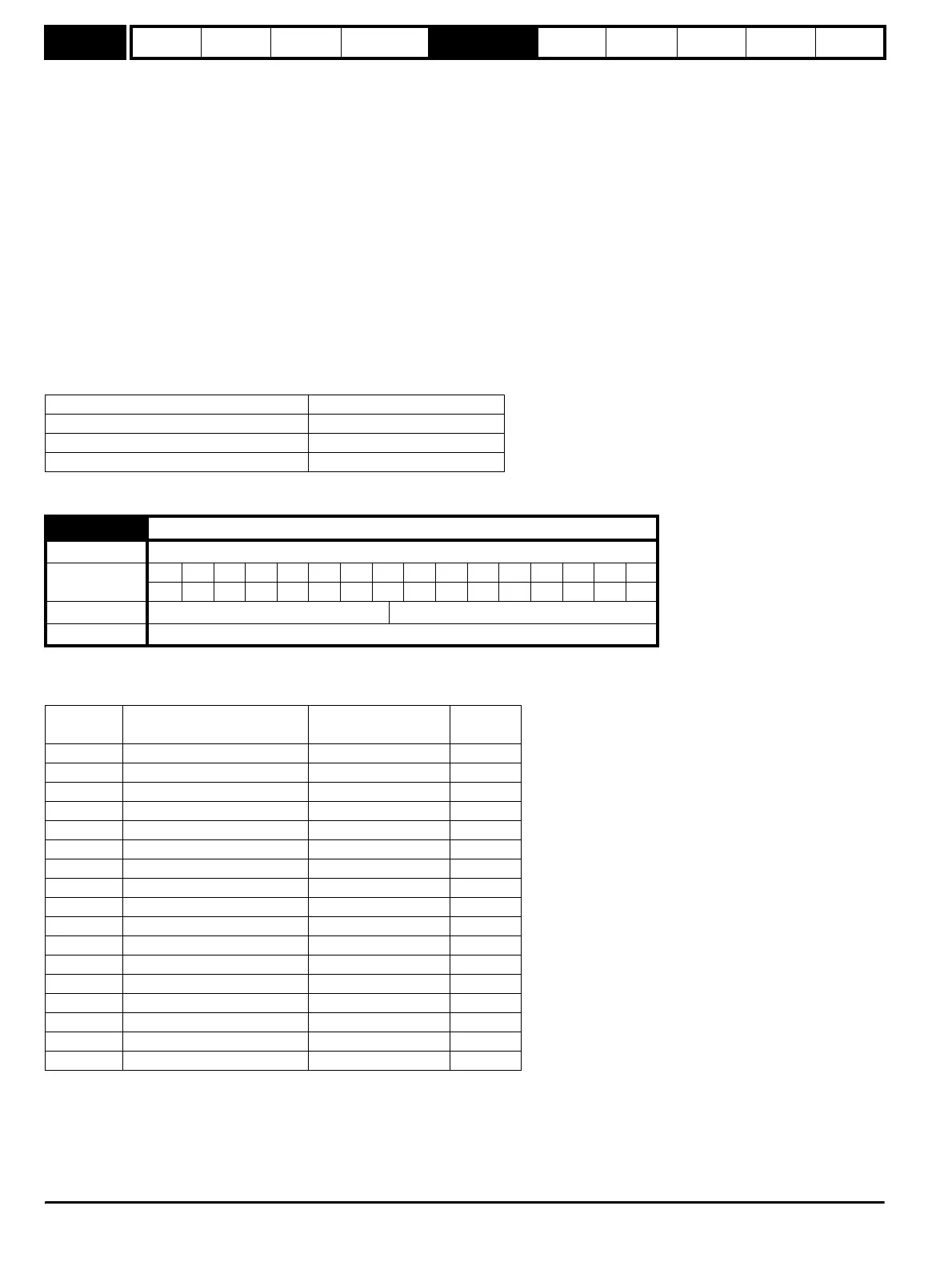
x.01 Option ID code
Drive modes Open-loop, Closed-loop vector, Servo, Regen
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1111
Range Open-loop, Closed-loop, Servo, Regen 0 to 499
Update rate Write on power-up
Code Module Category
Dumb
module
0 No module fitted
101 SM-Resolver Position feedback 9
102 SM-Universal Encoder Plus Position feedback
104 SM-Encoder Plus Position feedback 9
201 SM-I/O Plus I/O expansion module 9
301 SM-Applications Applications module
302 SM-Applications Lite Applications module
303 SM-EZMotion
401 reserved Fieldbus
402 reserved Fieldbus
403 SM-PROFIBUS-DP Fieldbus
404 SM-INTERBUS Fieldbus
405 reserved Fieldbus
406 SM-CAN Fieldbus
407 SM-DeviceNet Fieldbus
408 SM-CANopen Fieldbus
501 SM-SLM Position feedback
http://nicontrols.com