Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance
Feature look-
up table
356 Unidrive SP Advanced User Guide
www.controltechniques.com Issue Number: 7
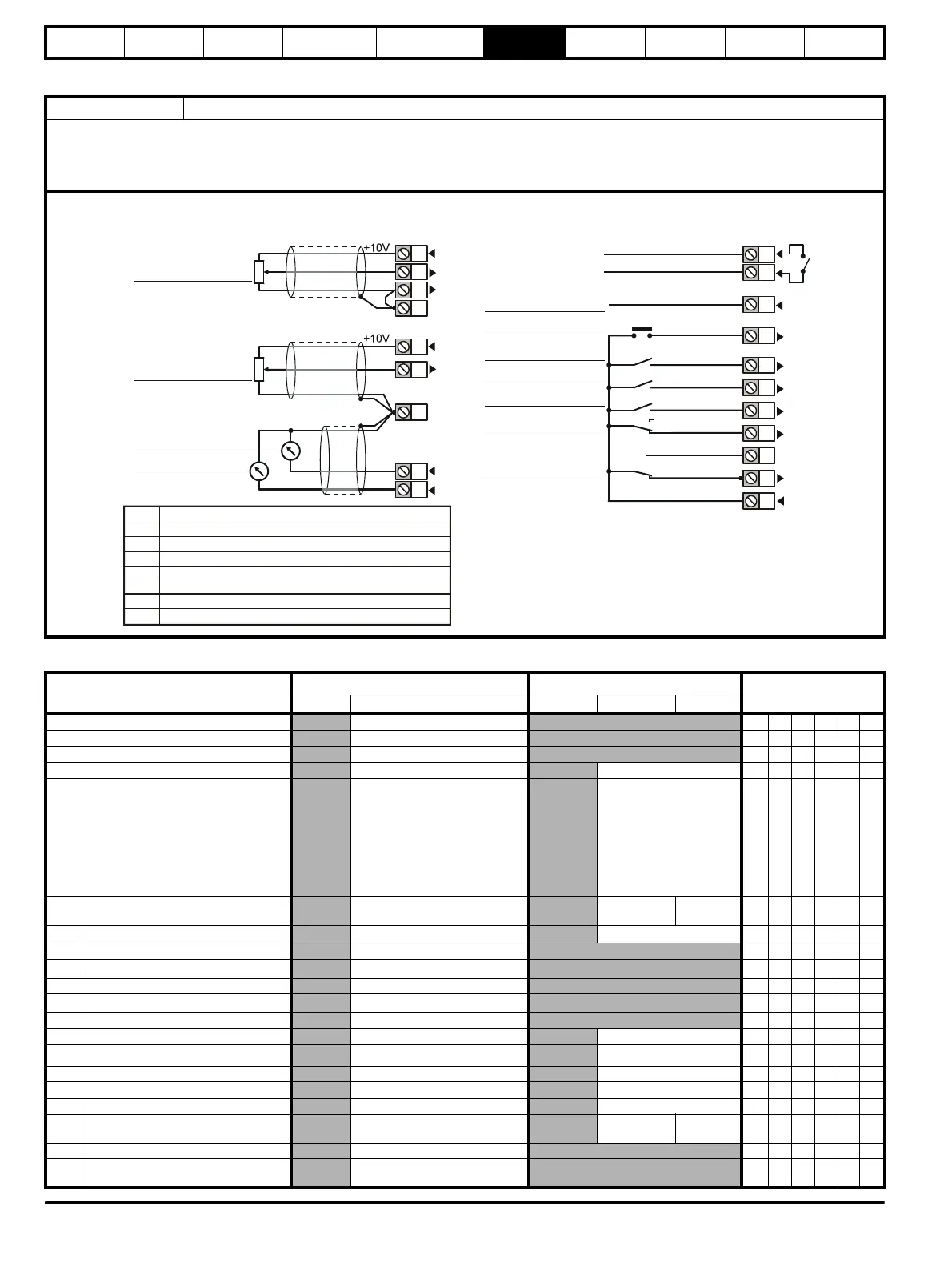
6.9 Macro 8 - Digital Lock
Table 6-16 Macro 8 menu 0 programmable parameters
Macro 8 Motorised potentiometer
Only available in closed loop vector or servo operating modes.
Digital lock: The drive operates as a slave in a closed loop master-slave system. The slave motor is digitally locked to the master motor.
Shaft orientation: The motor speed is controlled in the same way as for default operation, but the motor shaft can be orientated to a specified
angular position before and/or after running the motor.
0V common
Analog speed
reference 1
0 ~ 10V
SPEED
TORQUE
0V common
ORIENTATION
COMPLETE*
RESET
JOG SELECT**
RUN FORWARD
ANALOG INPUT 2
ANALOG INPUT 1
RUN REVERSE
ANALOG INPUT 1 /
INPUT 2
Analog speed
reference 2
0 ~ 10V
* Shaft orientation only
** Relative Jog when in Digital Lock mode
Pr
0 Speed control
1 Rigid digital lock with feed forward
2 Rigid digital lock without feed forward
3 Non rigid digital lock with feed forward
4 Non rigid digital lock without feed forward
5 Orientate when stopping the drive
6 Orientate when enabling and stopping the drive
0.15
4
5
6
3
7
11
9
10
4
24
25
29
26
27
28
0V common
30
31
+24V
22
DRIVE ENABLE
Signal
connector
Status relay
Drive healthy
41
42
Analog I
Digital I
Parameter
Range(
Ú) Default(Ö)
Type
OL CL OL VT SV
0.11 Pre-ramp reference {1.03}
±SPEED_FREQ_MAX Hz/rpm RO Bi NC PT
0.12 Post ramp reference {2.01}
±SPEED_FREQ_MAX Hz/rpm RO Bi PT
0.13 Active current {4.02}
±DRIVE_CURRENT_MAX A RO Bi FI NC PT
0.14 Relative jog reference {13.17}
0.0 to 4,000.0 rpm 0.0 RW Uni NC
0.15 Position controller mode {13.10}
Position controller disabled (0)
Rigid position control - feed fwd (1)
Rigid position control (2)
Non-rigid position control - feed
fwd (3)
Non-rigid position control (4)
Orientation on stop (5)
Orientation on stop and when drive
enabled (6)
Position controller disabled
(0)
RW Uni US
0.16
Drive encoder lines per
revolution
{3.34}
0 to 50,000 1024 4096 RW Uni US
0.17 Ratio numerator {13.07}
0.000 to 4.000
1.000
RW Uni US
0.18 Drive encoder speed feedback {3.27}
±40,000.0 rpm RO Bi FI NC PT
0.19 Drive encoder position {3.29}
0 to 65,535 1/2
16
ths of a revolution
RO Uni FI NC PT
0.20 Position error {13.02}
-32,768 to +32,767 RO Uni NC PT
0.21 Position {x.05}
0 to 65,535 1/2
16
ths of a revolution
RO Uni FI NC PT
0.22 Speed {x.03}
±40,000.0 rpm RO Bi FI NC PT
0.23 Equivalent lines per revolution {x.10}
0 to 50,000 4096 RW Uni US
0.24 Position controller P gain {13.09}
0.00 to 100.00 rad s
-1
/
rad
25.0 RW Uni US
0.25 Position controller speed clamp {13.12}
0 to 250 150 RW Uni US
0.26 Orientation position reference {13.13}
0 to 65,535 0RWUni US
0.27 Orientation acceptance window {13.14}
0 to 4,096 256 RW Uni US
0.28 Stop mode {6.01}
COASt (0), rP (1),
no.rP (2)
rP (1)
no.rP (2)
RW Txt US
0.29 Revolution counter {x.04}
0 to 65,535 revolutions RO Uni FI NC PT
0.30
Drive encoder revolution
counter
{3.28}
0 to 65,535 revolutions RO Uni FI NC PT
http://nicontrols.com