Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance
Feature look-
up table
Menu 21
Unidrive SP Advanced User Guide 321
Issue Number: 7 www.controltechniques.com
Pr 21.15 does not have an equivalent normal motor parameter, but shows when motor 2 is active.
When the second motor is selected the gains defined in Pr 21.17 to Pr 21.19 are used directly by the speed controller. The speed controller set-up
method defined by Pr 3.13 is ignored.
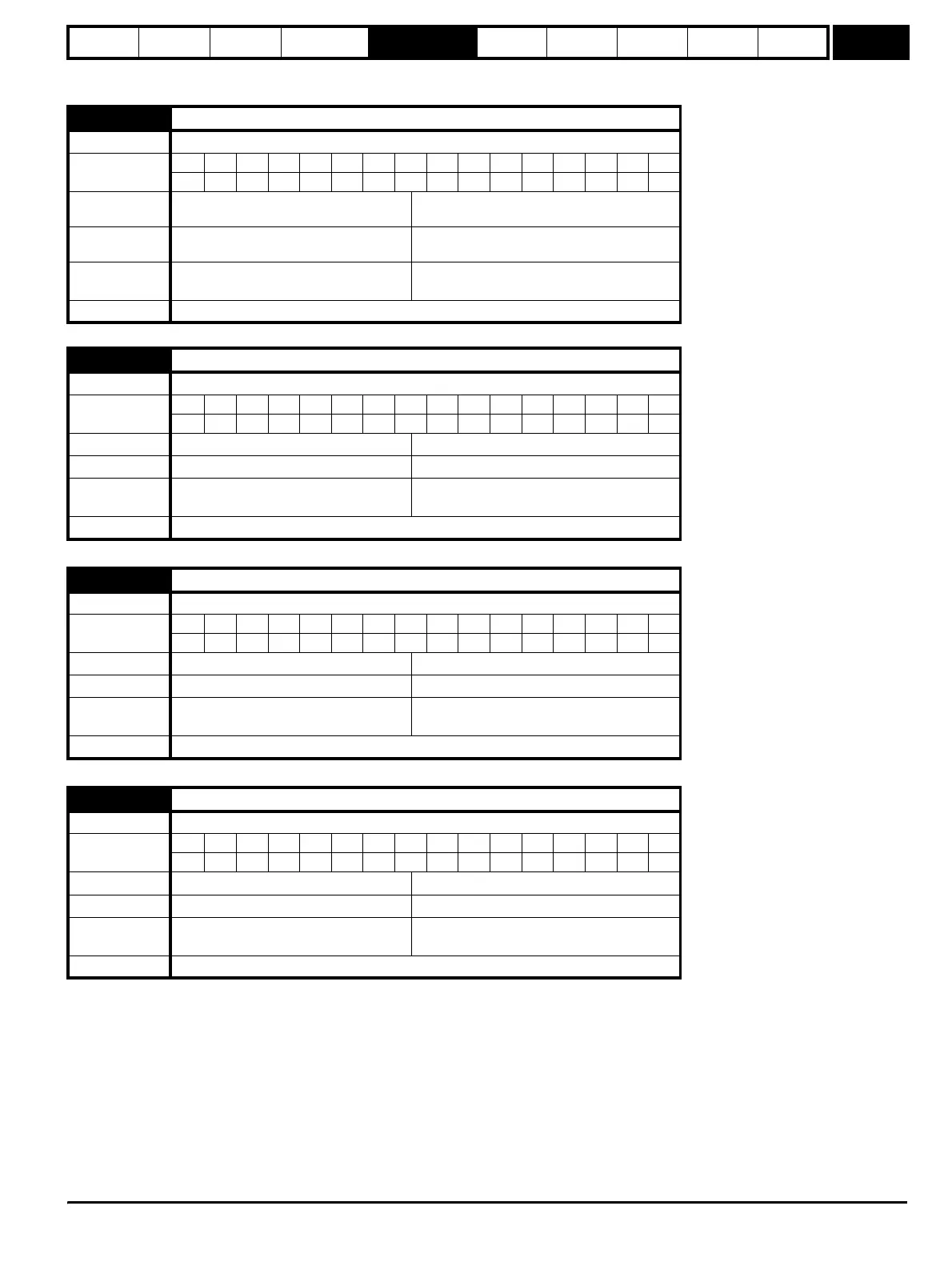
21.16 Thermal time constant
Drive modes Open-loop, Closed-loop vector, Servo, Regen
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
111
Range
Open-loop, Closed-loop vector, Servo,
Regen
0.0 to 400.0
Default
Open-loop, Closed-loop vector, Regen
Servo
89.0
20.0
Normal motor
parameter
Open-loop, Closed-loop vector, Servo,
Regen
Pr 4.15
Update rate Background read
21.17 Speed controller Kp gain
Drive modes Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
2111
Range Closed-loop vector, Servo
0.00 to 6.5335 (1/rad s
-1
)
Default Closed-loop vector, Servo 0.0100
Normal motor
parameter
Closed-loop vector, Servo Pr 3.10
Update rate Background read
21.18 Speed controller Ki gain
Drive modes Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
2111
Range Closed-loop vector, Servo
0.00 to 653.35 s/rad s
-1
Default Closed-loop vector, Servo 1.00
Normal motor
parameter
Closed-loop vector, Servo Pr 3.11
Update rate Background read
21.19 Speed controller Kd gain
Drive modes Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
5111
Range Closed-loop vector, Servo
0.00000 to 0.65335 s
-1
/ rad s
-1
Default Closed-loop vector, Servo 0.00000
Normal motor
parameter
Closed-loop vector, Servo Pr 3.12
Update rate Background read
http://nicontrols.com