Operation
5.8.2.6.3.6 Orbital Element Tracking (OPTIONAL)
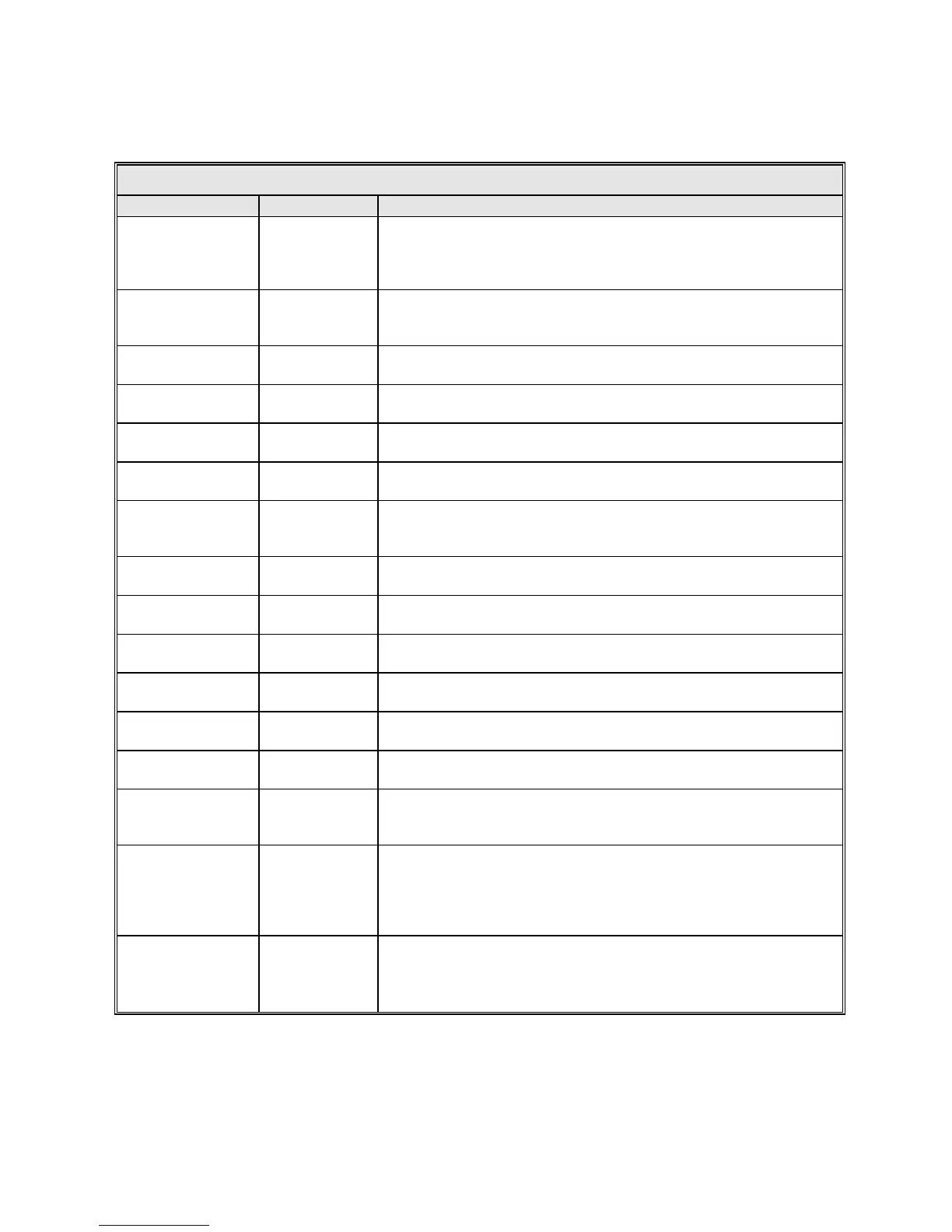
Table 5-15 describes the Orbital Element Tracking parameters.
TABLE 5-15 ORBITAL ELEMENT TRACKING PARAMETERS
Test element set This command tests the Orbital element set for validity. This test is
run automatically in the visual shell when this menu is exited. Run
from the M&C shell, returns the following code: 0:
ok 1: >= 1 invalid terms (test couldn’t be more specific.)
Year YYYY This is the year portion of the Epoch time on which the element set is
based. Note that the input value MUST be a 4 digit number. E.g.:
1990 is OK but 90 is not. 2001 is OK but 01 is not.
Month MM Month is the month portion of the Epoch time on which the element
set is based. Note that the input is a 2 digit value.
Day DD Day is the day portion of the Epoch time on which the element set is
based. Note that the input is a 2 digit integer value.
Hour HH Hour is the hour portion of the Epoch time on which the element set is
based. Note that the input is a 2 digit integer value.
Minute MM Minute is the minute portion of the Epoch time on which the element
set is based. Note that the input is a 2 digit integer.
Second SS.SSS Second is the second portion of the Epoch time on which the element
set is based. Note that the input is a 2 digit real with 3 digit fractional
X Position [km] XXXXXX.XXXX Earth Centered Inertial X Position in a True Earth Mean Equinox (TEME)
reference fixed at the time of Epoch. Units: km
Y Position [km] XXXXXX.XXXX Earth Centered Inertial Y Position in a True Earth Mean Equinox (TEME)
reference fixed at the time of Epoch. Units: km
Z Position [km] XXXXXX.XXXX Earth Centered Inertial Z Position in a True Earth Mean Equinox (TEME)
reference fixed at the time of Epoch. Units: km
X Velocity [m/sec] XXXXXX.XXXX Earth Centered Inertial X Velocity in a True Earth Mean Equinox
(TEME) reference fixed at the time of Epoch. Units: m/sec
Y Velocity [m/sec] XXXXXX.XXXX Earth Centered Inertial Y Velocity in a True Earth Mean Equinox (TME)
reference fixed at the time of Epoch. Units: m/sec
Z Velocity [m/sec] XXXXXX.XXXX Earth Centered Inertial Z Velocity in a True Earth Mean Equinox (TEME)
reference fixed at the time of Epoch. Units: m/sec
Polarization Angle
[deg]
Polarization angle used with Orbital Element tracking, if polarization is
enabled. If the ACU doesn’t control polarization, this value is
irrelevant. Range: -180 to 180.0
Bias Angles [deg] These angles are added to the look angles to come up with the target
position. These exist because the look angles can only be edited by
supervisor, whereas the bias angles can be edited by an operator.
This allows periodic re-peaking of the target without worrying about
losing the base position. Range: -180 to 180.0
Pointing Update
Time [ms]
This value controls the frequency at which new look angles are
calculated from the OE Set. Nominal value is 2000 ms (2 seconds)
and can be increased to lower work load on CPU. Pointing update
time range: 500-120000.
5-30