Operation
5.8.6.3 Steptrack Defaults Menu
This Steptrack defaults... menu has the same steptrack parameters that are found
in the Edit steptrack parameters... menu under Immediate tracking.... Refer to
Table 5-5 for a listing and description of the parameters.
Whenever a new OPT target is created, the initial parameter values for the target
are obtained from Table 5-5. The values of these parameters only affect the
creation of new OPT targets; once a target is created, it has its own set of
steptrack parameters. Changes made to the defaults will not affect targets created
before the defaults were changed. In addition, Immediate steptrack gets its default
steptrack parameters from this table.
5.8.6.4 Position Encoder Configuration Menu
The Position encoder configuration... menu allows the user to set the position
encoder offsets. The offset for an axis is the difference between the actual axis
position and the angle returned by the encoder. When the encoder bracketry is
properly aligned, this difference (the offset) is a constant throughout the range of
motion of the antenna.
In addition, the 7200 ACU has the ability (in software) to reverse the direction in
which the encoders count; that is, when the encoder indicates movement in the
CW direction of its shaft but the ACU reports CCW direction, and vice versa.
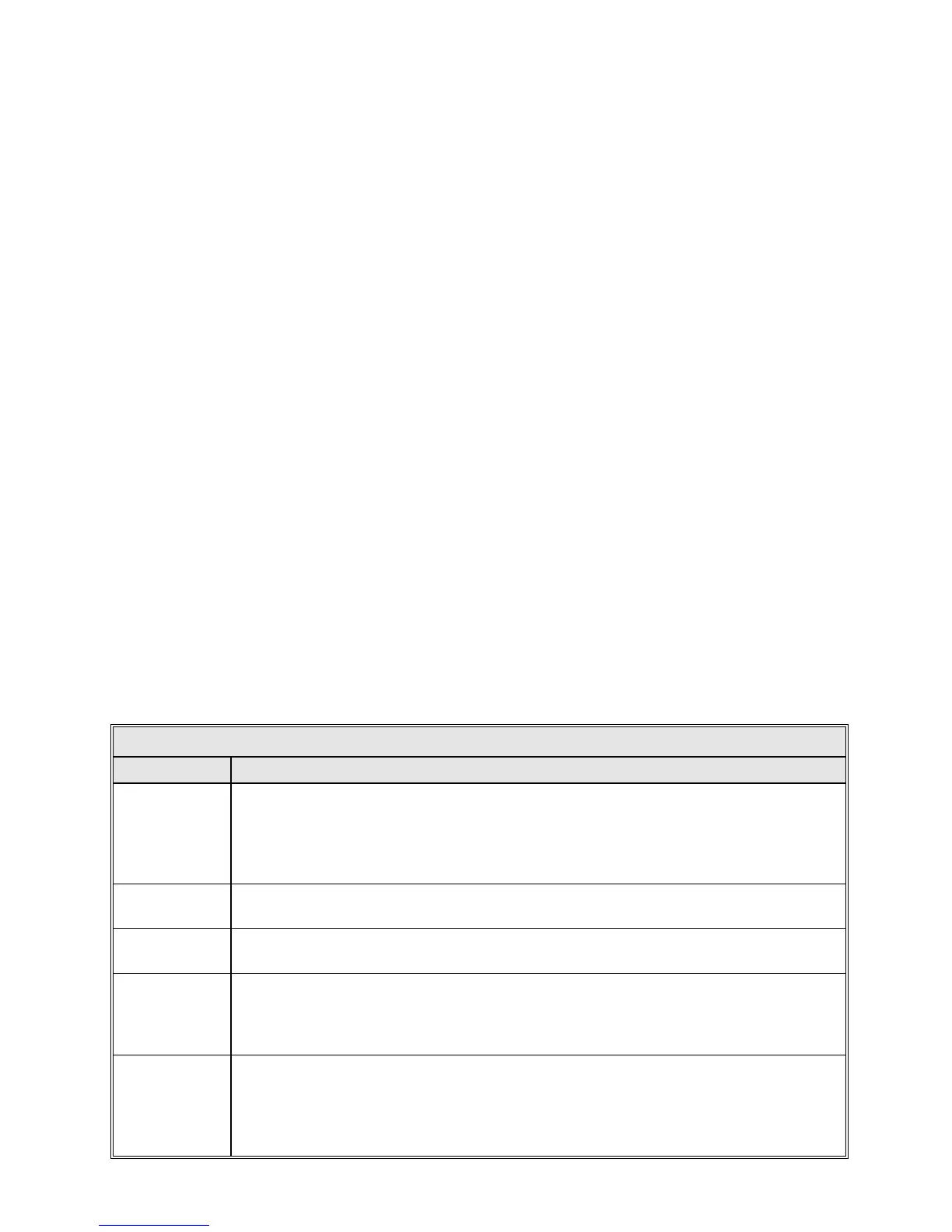
Table 5-27 describes the Position encoder configuration... parameters.
TABLE 5-27 POSITION ENCODER CONFIGURATION PARAMETERS
PARAMETER DESCRIPTION
Encoder
direction
This sets the counting direction, or "sense" of the encoders (resolvers). If antenna
movement in one direction causes the resolvers to indic
ate motion in the opposite
direction, the direction may either be reversed by changing the phasing of the resolvers, or
by changing the direction for that axis from Fwd (forward) to Rev (reversed). NOTE: For
absolute optical encoders, this is the only way to change the counting direction.
Current
position [deg]
For each axis, the current position is the "raw position" returned from the encoder plus the
offsets.
Offsets [deg]
Value added to the raw position to determine the current position, or the difference
between the actual axis position and the angle returned by the encoder.
Encoder type
This selects the type of encoders (resolvers) used by the ACU. This is determined by the
hardware installed at the factory; changing this item from the proper value will leave the
ACU inoperative. See the following table for supported encoder types (position feedback
devices).
2-speed
internal
alignment
This option will appear on the menu only in systems with Encoder type set to 2-speed
resolvers. These values are used to correct the internal alignment of the two-speed
resolvers. The correction value is determined from the RDC diagnostics screen. To
determine the value, rotate the resolver shaft until the coarse reading is 0000 (hex) and
refer to Appendix C.
5-54