Operation
Table 5-29 describes the Motion limits... parameters.
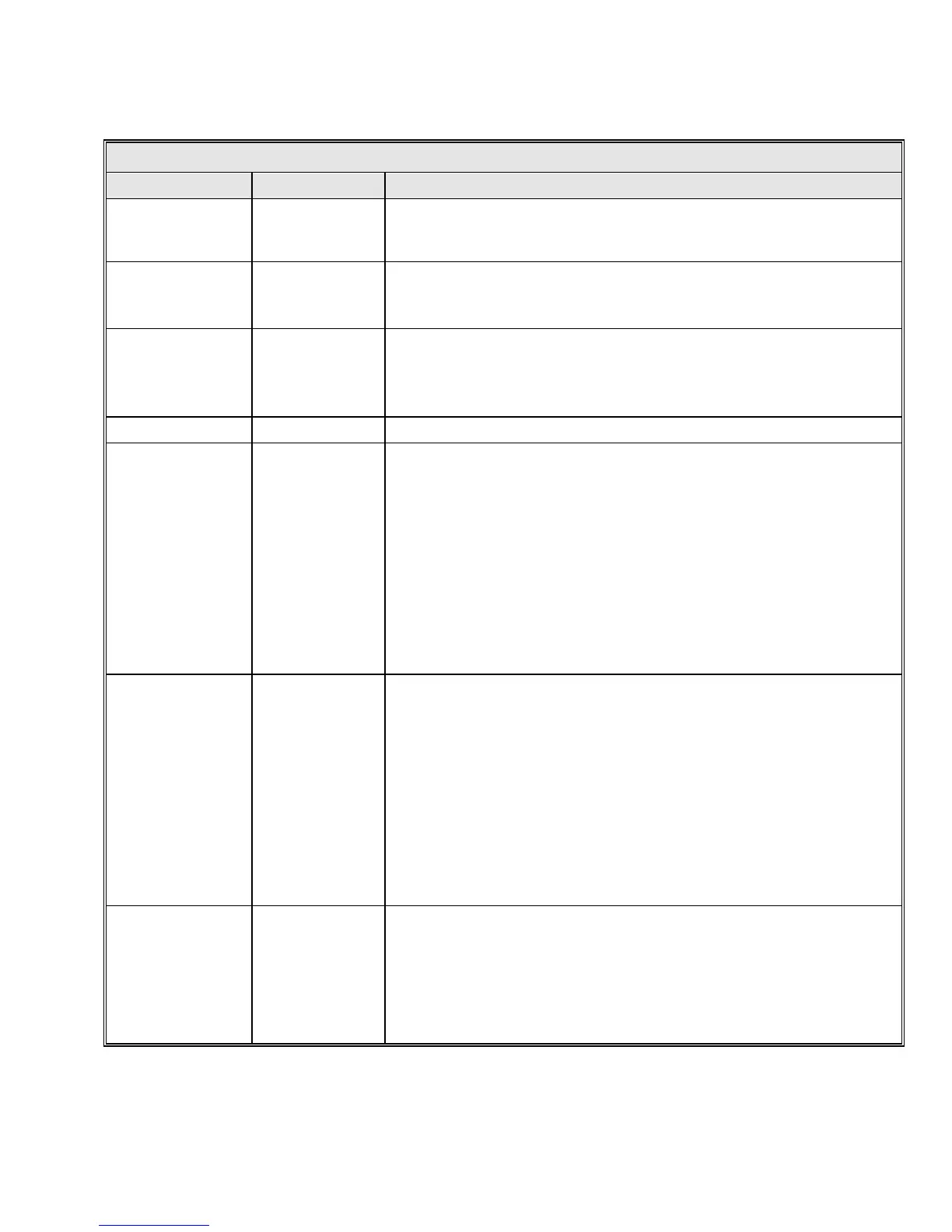
TABLE 5-29 MOTION LIMITS PARAMETERS
PARAMETER DEFAULT DESCRIPTION
Soft limits Enabled
These are normally
enabled. If the antenna needs to be moved to its limit
switches (from the ACU) for maintenance purposes, the soft limits should be
temporarily disabled.
Lower/CCW soft
limits [deg]
AZ: 100.00
EL: 15.00
POL: -90.00
This position vector (along with Upper/C
W soft limits [deg]) defines the
range of motion that the ACU will allow. For each axis, if the antenna is at
the lower/CCW limit, it may be moved up/CW to the upper/CW limit.
Upper/CW soft
limits [deg]
AZ: 260.00
EL: 90.00
POL: 90.00
4thAxis: 90.00
This
position vector (along with Lower/CCW soft limits [deg]) defines the
range of motion that the ACU will allow. For each axis, if the antenna is at
the lower/CCW limit, it may be moved up/CW to the upper/CW limit.
Motion errors Enabled Normally enabled, but may be disabled for testing purposes.
Immobile/reversed
timeout [ms]
AZ: 2000
EL: 2000
POL: 2000
4thAxis 2000
Whenever the antenna is put into motion, the downcounter is loaded with
this parameter and the current position is recorded. When that downcounter
expires, the current position is compared against the previously recorded
position. If, for each axis, encoders do not show a value of at least
Immobile/reversed tolerance [deg] of motion, an "axis" immobile error is
displayed (where "axis" is AZ, EL
, or POL). Selecting Clear/correct system
faults from the Main menu may clear the error. If the encoders show
movement greater than the tolerance on an axis, but in the opposite
direction in which the ACU commanded the antenna, an axis reversed error
is displayed. If the test is passed for all three axes, the downcounter is reset
with the Immobile/reversed timeout [ms] and the process is repeated
continuously.
Immobile/reversed
tolerance [deg]
AZ: 0.02
EL: 0.02
POL: 0.20
4thAxis: 0.20
If the encoders show movement greater than the tolerance on an axis, but in
the opposite direction in which the ACU commanded the antenna, an axis
reversed error is displayed. Selecting Clear/correct system faults from the
Main menu may clear the error. If the test is passed for all three axes, the
downcounter is reset with the Immobile/reversed timeout [ms] and the
process is repeated continuously. When the antenna is commanded to stop,
the ACU waits for it to come to rest, then records the position. If, any at
point in
the future, the current position is different from the recorded
position more than the value of the Runaway angle on an axis when the ACU
is not commanding the antenna to move, an axis runaway error is displayed
and all drives are disabled. Selecting Cle
ar/correct system faults from the
Main menu... resets the drives and clears the error.
Runaway angle
[deg]
AZ: 0.1
EL: 0.1
POL 0.2
4thAxis: 0.2
When the antenna is commanded to stop, the ACU waits for it to come to
rest, then records the position. If, at
any point in the future, the current
position differs from the recorded position by more than the value of this
parameter on an axis when the ACU is not commanding the antenna to
move, an axis runaway error is displayed and all drives are disabled.
Selecting Clear/correct system faults from the Main menu resets the drives
and clears the error.
5-57