Operation
The parameters under this menu may be changed by selecting the desired
parameter, and using the up and down arrow keys, toggling through the
preprogrammed choices. When the desired setting is highlighted, press the
[ENTER] key.
To save the changes, press [PRIOR] and answer yes when prompted to save the
changes.
5.8.6.15 Tracking Restoration Options Menu
This menu controls how the ACU restores tracking after an interruption such as
power loss or a fault (e.g., emergency stop). By default, the ACU attempts to
return to tracking the last target it was tracking as soon as the fault condition(s)
clears. Some users may wish to inhibit this restoration action under certain fault
conditions and can accomplish this by changing the parameters in this menu. Table
5-39 lists the parameters, their defaults, and a description of each of the
parameters under this menu.
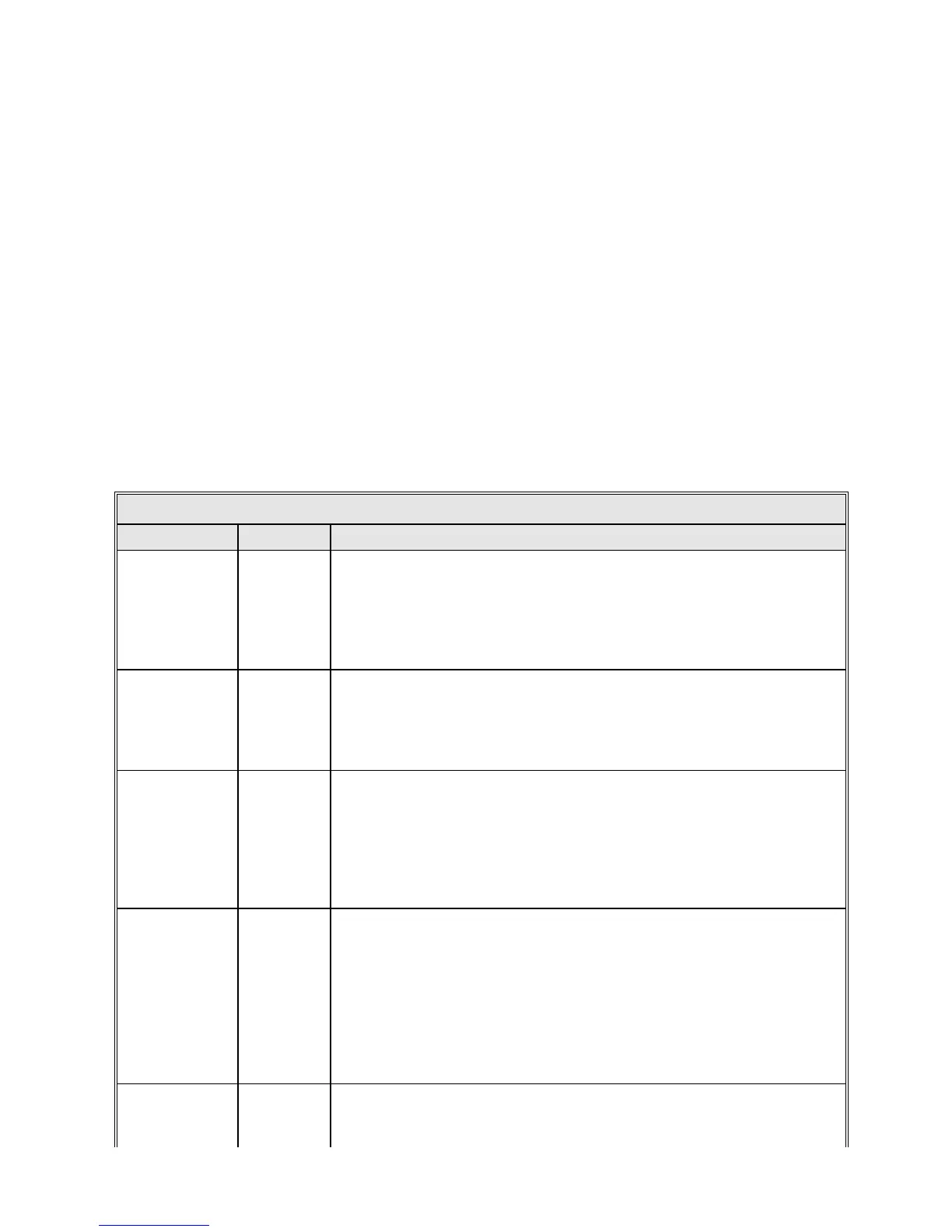
TABLE 5-39 TRACKING RESTORATION OPTIONS PARAMETERS
PARAMETER DEFAULT DESCRIPTION
Standby after
boot
Disabled
If this parameter is Disabled, when the ACU is powered up, it attempts to
resume tracking the target it was tracking when power was lost. If the
system was in Standby or manual, the ACU powers up in Standby mode,
and if the Target scheduler was running, it will be restarted. If this
parameter is Enabled, the ACU will return to Standby when powered up
and automatic tracking will not resume.
Standby on
emergency stop
Disabled
Regardless of the setting of this parameter, the ACU cannot command the
antenna unless all emergency stops are disengaged. If this parameter is
Disabled, when emergency stops are cleared, the ACU resumes tracking
the target. If this is Enabled, the ACU returns to Standby mode
immediately upon detection of an emergency stop.
Standby on
motor controller
fault
Disabled
If this parameter is Disabled, the ACU waits for the motor controller fault to
clear and then resumes tracking the target. If this parameter is set to YES,
the ACU returns to Standby immediately upon detection of the fault.
NOTE: Clear/correct system faults resets the drive cabinet if a motor
controller fault exists, which normally clears the fault. If one motor
controller fails and the other continues to operate, the ACU continues
tracking on the axis that is still operable.
Standby on
maintenance
override
Disabled
The setting of this parameter determines what the ACU does when the user
flips the CONTROL switch at the drive cabinet from REMOTE to MAINT to
allow local control of the antenna at the drive cabinet. If this parameter is
Disabled, the ACU waits for the drive cabinet to be switched from MAINT.
to REMOTE, and then resumes tracking the target. If Enabled, the ACU
returns to Standby immediately upon detection of the CONTROL switch
being returned to the MAINT position. NOTE: Regardless of the setting of
this parameter, the ACU cannot command the antenna unless the switch is
in the REMOTE position.
cabinet power
loss
Disabled
If Disabled, when power is lost to the drive cabinet, the ACU waits for
power to be restored and then resumes tracking. If Enabled, the ACU
returns to Standby immediately upon detection of loss of power.
5-79