8 Basic drive functions (MCK)
8.4 Basic settings
538
Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Behaviour in the case of active software limit positions
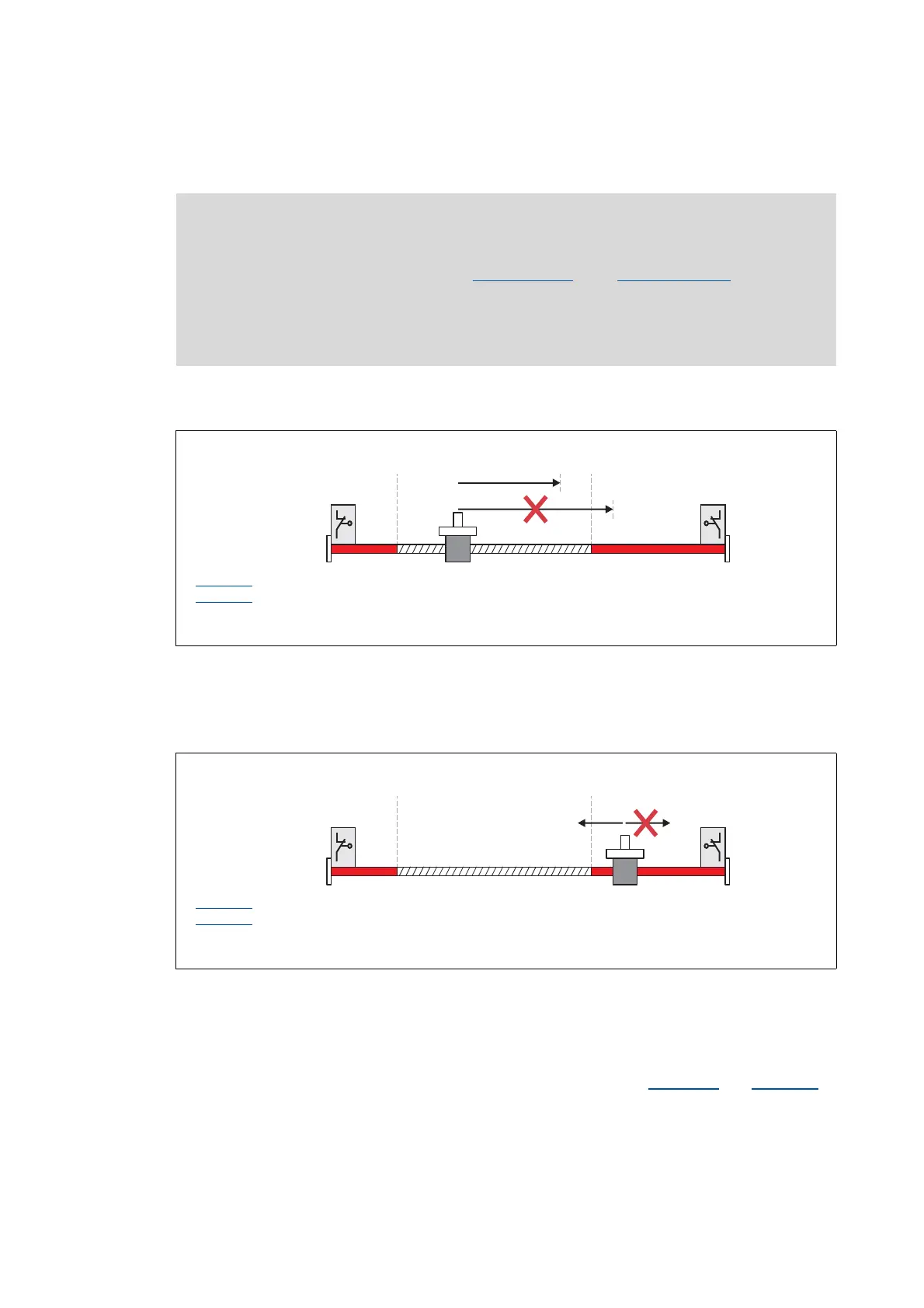
If the software limit positions are active, travelling commands that would result in exiting from the
permissible travel range can no longer be executed:
[8-17] Example: Traversing range limitation by means of software limit positions
If the drive is already outside the permissible travel range and the software limit positions have
been activated, only travel commands that result in the drive moving back into the permissible
travel range can be executed:
[8-18] Example: Permissible traversing direction if software limit positions active
If the software limit positions are active and a software limit position is passed ("overtravel"):
• The error response "TroubleQuickStop" takes place in the Lenze setting, i.e. the drive is brought
to a standstill in the deceleration time set for the quick stop function and does so irrespective of
the setpoint selection. The error response can be parameterised in C00595/3
and C00595/4.
• The error message "Ck03: Pos. SW limit position" or "Ck04: Neg. SW limit position" is entered in
the logbook of the inverter.
• Depending on the parameterised fault response, the drive cannot traverse until the error has
been acknowledged.
Note!
The"travel commands" mentioned in the following description are no speed setpoint
selections. In the operating modes "Speed follower
" and "Position follower", an
acknowledged software limit position error ensures that traversing into the
impermissible travel range remains possible afterwards. This is because in these two
operating modes, there is no preview whether a software limit position is approached or
not with a setpoint selection.
C01229/2: Negative software limit position
C01229/1
: Positive software limit position
Travel command possible
Travel command not possible since the target position is outside the permissible traversing range.
C01229/2: Negative software limit position
C01229/1
: Positive software limit position
Traversing in "retracting direction" possible
Traversing opposite to "retracting direction" not possible