Servo control
4.13 Motor data identification
Drive functions
Function Manual, 11/2017, 6SL3097-4AB00-0BP5
155
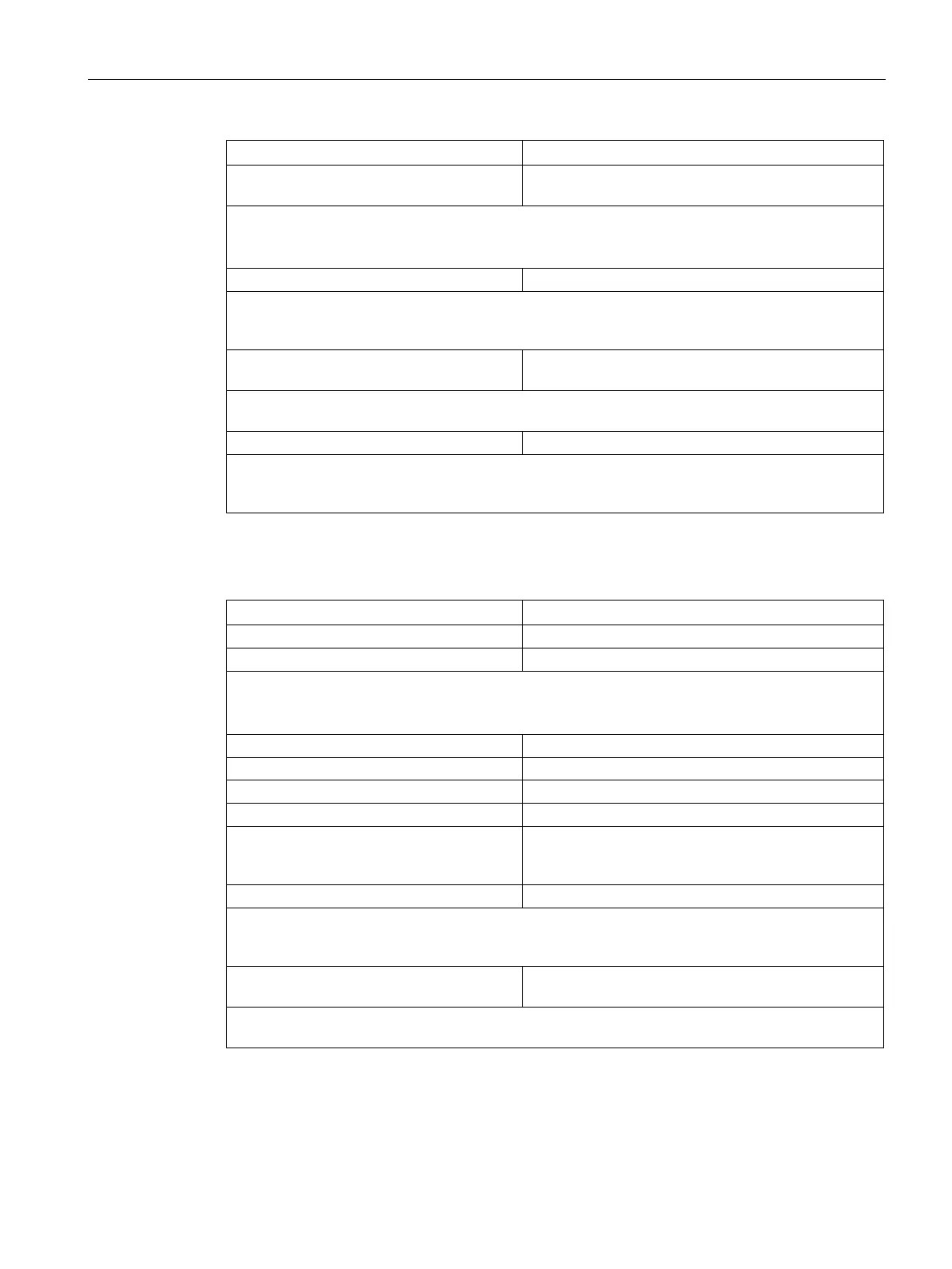
Data that is accepted (p1910 = 1)
r1951 voltage emulation error, current val-
p1953 voltage emulation error, current offset
Note regarding r1950 to p1953:
Active when the function module "extended torque control" is activated and activated compensation
of the voltage emulation error (p1780.8 = 1).
r1973 encoder pulse number identified
The encoder pulse number is only determined with a very high degree of inaccuracy (p0407/p0408)
and is only suitable for making rough checks. The sign is negative if inversion is required (p0410.0).
r1984 pole position identification angular
p0431 commutation angle offset
r1984 indicates the difference of the commutation angle offset before being transferred into p0431.
p0410 encoder inversion actual value
If the encoder inversion is changed using motor data identification, fault F07993 is output, which
refers to a possible change in the direction of rotation and can only be acknowledged by p1910 = -2.
Table 4- 15 Data determined using p1960 for synchronous motors (rotating measurement)
Data that is accepted (p1960 = 1)
r1934 q inductance identified
r1935 q inductance identification current
:
The q inductance characteristic can be used as basis to manually determine the data for the current
controller adaptation (p0391, p0392 and p0393).
r1937 torque constant identified
p0316 motor torque constant
r1938 voltage constant identified
p0317 motor voltage constant
r1939 reluctance torque constant identified
p0328 motor reluctance torque constant
r1947 optimum load angle identified p0327 optimum motor load angle
r1969 moment of inertia identified p0341 motor moment of inertia · p0342 ratio between
the total moment of inertia and that of the mo-
tor + p1498 load moment of inertia
r1973 encoder pulse number identified
The encoder pulse number is only determined with a very high degree of inaccuracy (p0407/p0408)
and is only suitable for making rough checks. The sign is negative if inversion is required (p0410.0).
r1984 pole position identification angular
p0431 commutation angle offset
r1984 indicates the difference of the commutation angle offset before being transferred into p0431.
 Loading...
Loading...

























