Communication
11.2 Communication via PROFIBUS DP
Drive functions
788 Function Manual, 11/2017, 6SL3097-4AB00-0BP5
Motion Control with PROFIBUS
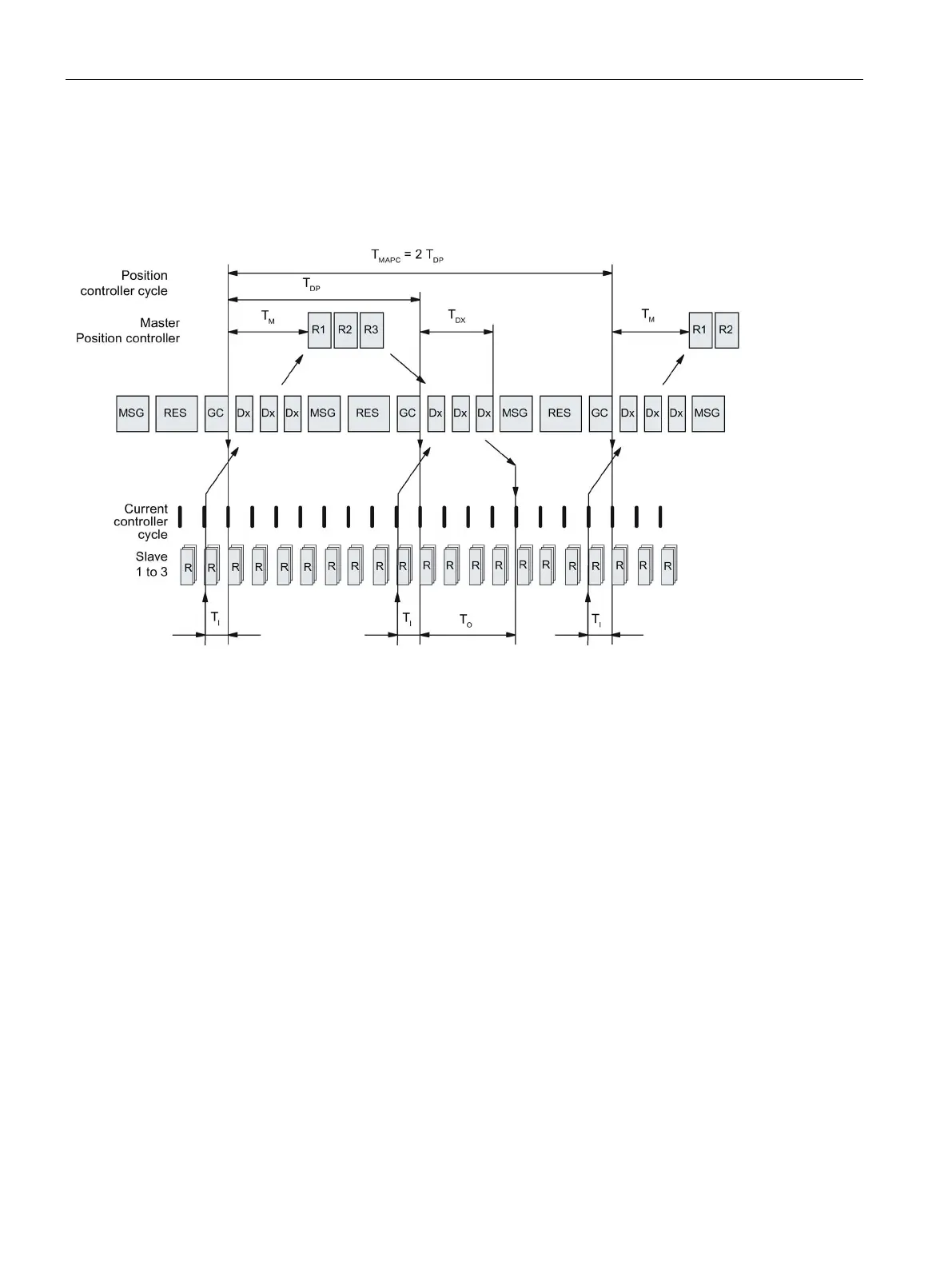
Motion control / isochronous drive coupling with PROFIBUS
Figure 11-17 Motion control / isochronous drive coupling with PROFIBUS, optimized cycle with T
MAPC
= 2 ∙ T
DP
Sequence of data transfer to closed-loop control system
1. The actual position value G1_XACT1 is read into at time T
I
before the start of each cycle
and transferred to the master in the next cycle.
2. The closed-loop control of the master starts at time T
M
after each position controller cycle
and uses the transferred actual value in the telegram.
3. In the next cycle, the master forwards the calculated setpoints to the slaves. The speed
setpoint command NSET_B is issued to the closed-loop control system at time T
O
after
the beginning of the cycle.
 Loading...
Loading...

























