Communication
11.2 Communication via PROFIBUS DP
Drive functions
Function Manual, 11/2017, 6SL3097-4AB00-0BP5
789
Designations and descriptions for motion control
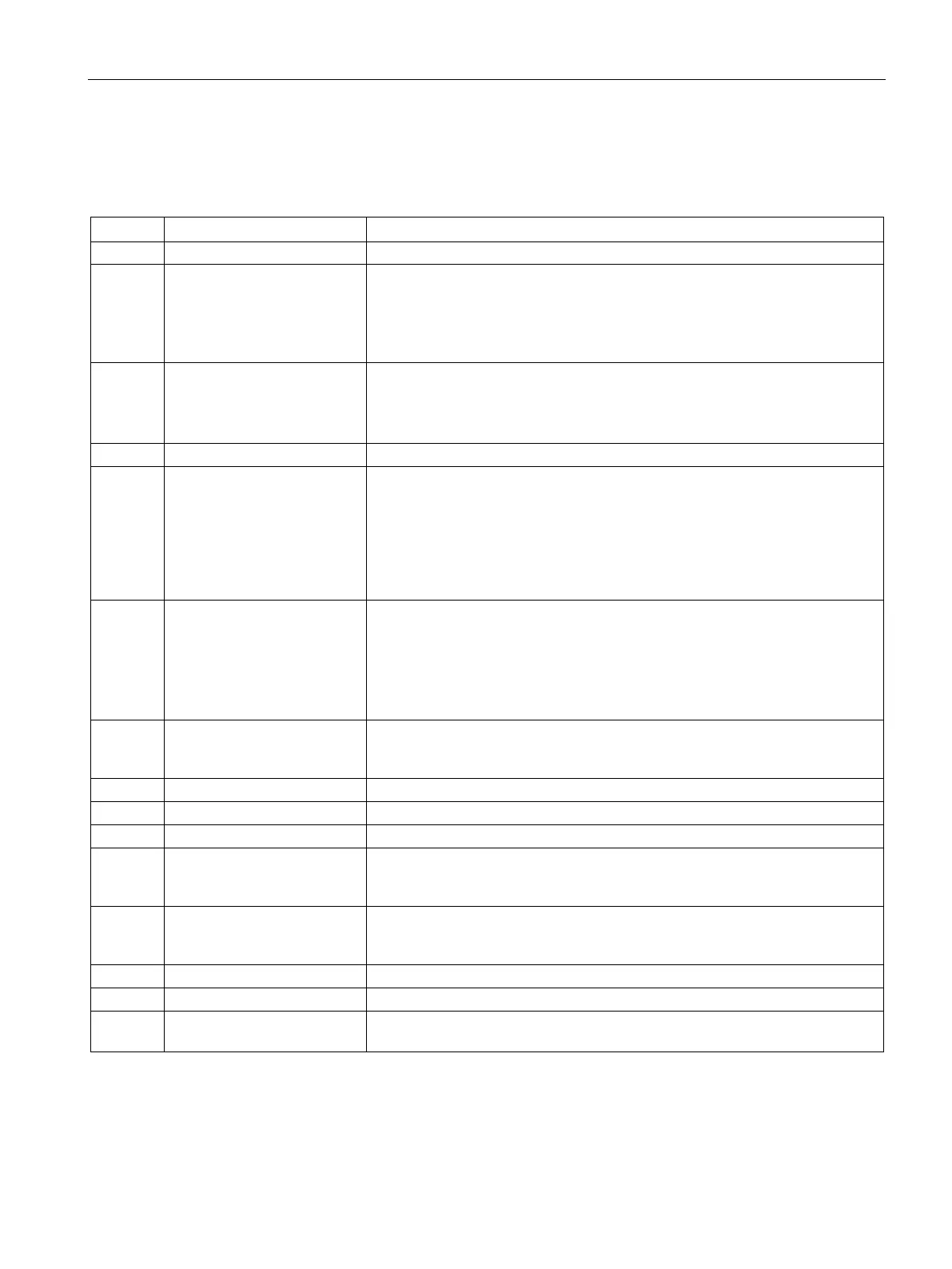
Table 11- 10 Time settings and meanings
T
DP
T
DP
≥ T
DP_MIN
T
DP_MIN
≤ T
DP
≤ T
DP_MAX
DP cycle time
T
DP
= Dx + MSG + RES + GC
T
DP
= multiple integer ∙ T
BASE_DP
T
DP_MIN
= 1 ms
T
MAPC
Master application cycle time
This is the time frame in which the master application generates new setpoints
(e.g. in the position controller cycle).
MAPC
DP
T
I
T
I_MIN
≤ T
I
< T
DP
Time of actual-value sensing
This is the time at which the actual position value is captured before the start of
each cycle.
T
I
= integer multiple of T
BASE_IO
T
I_MIN
corresponds to the longest current controller cycle (p0115[0]) of a drive
object (SERVO/VECTOR) in the drive unit, minimum 125 µs.
Does not apply to vector V/f.
T
O
T
DX
+ T
O_MIN
≤ T
O
< T
DP
Time of setpoint transfer
This is the time at which the transferred setpoints (speed setpoint) are accept-
ed by the closed-loop control system after the start of the cycle.
T
O
= integer multiple of T
BASE_IO
T
O_MIN
corresponds to the longest speed controller cycle (p0115[1]) of a drive
object (SERVO/VECTOR) in the drive unit, minimum 125 µsec
T
DX
T
DX
< T
DP
Data exchange time
This is the time required within one cycle for transferring process data to all
PLL_W
Global Control Telegram (broadcast telegram)
Dx Data_Exchange
This service is used to implement user data exchange between master and
MSG Acyclic service
This service is used to implement user data exchange between master and
slave 1 - n on an acyclic basis.
Reserve: "Active pause" until the isochronous cycle has expired
Computation time, speed or position controller in the master or slave
T
M
Master time
Start of closed-loop master control
 Loading...
Loading...

























