Basic functions
7.24 Terminal Module 41
Drive functions
406 Function Manual, 11/2017, 6SL3097-4AB00-0BP5
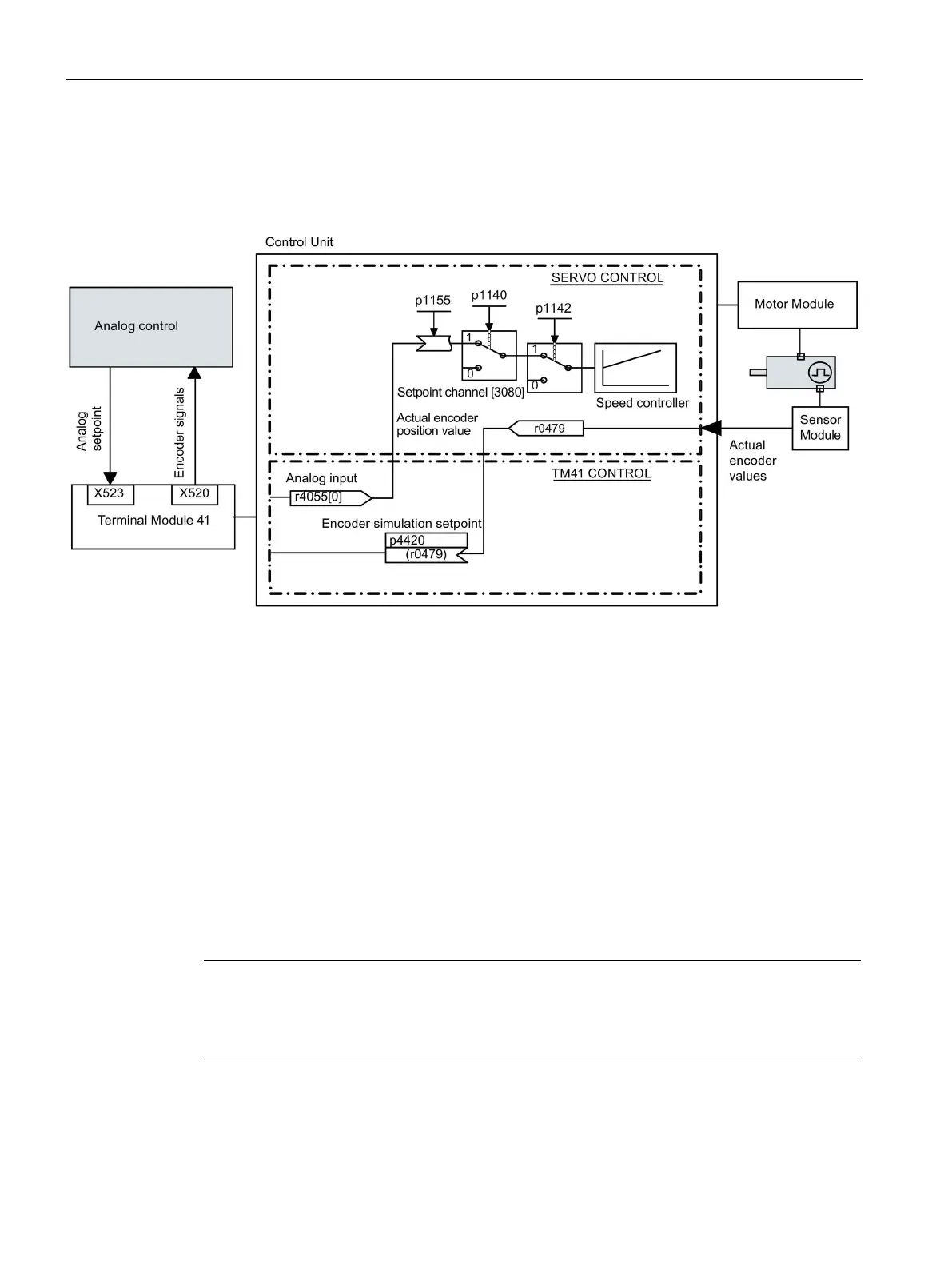
Example in the SINAMICS mode
The signals of the leading encoder should be adapted using the TM41 and transferred to the
SERVO drive object.
Figure 7-23 Example: TM41
Commissioning the example
Input of parameter values via STARTER screen form:
● p4400 = 1 (encoder emulation by means of encoder actual position value)
● p4420 = r0479[n] (SERVO or VECTOR), n = 0...2
● p4408 = sets the gear ratio pulse number (this must correspond to the pulse number of
the leading encoder)
● p4418 = sets the fine resolution of the signal source (this must correspond to the fine
resolution of the leading encoder)
● p0408 = sets the pulse number of the encoder emulation
● p0418 = sets the fine resolution of the encoder emulation
Note
To be able to signal encoder emulation faults of the TM41 to a higher
-level controller,
er r2139.0...8 CO/BO: Status word faults/alarms 1 must be interconnected via a
BICO with a digital output (TM41 or CU) which can be read by the external control system.
 Loading...
Loading...

























