Function modules
8.8 Basic positioner
Drive functions
526 Function Manual, 11/2017, 6SL3097-4AB00-0BP5
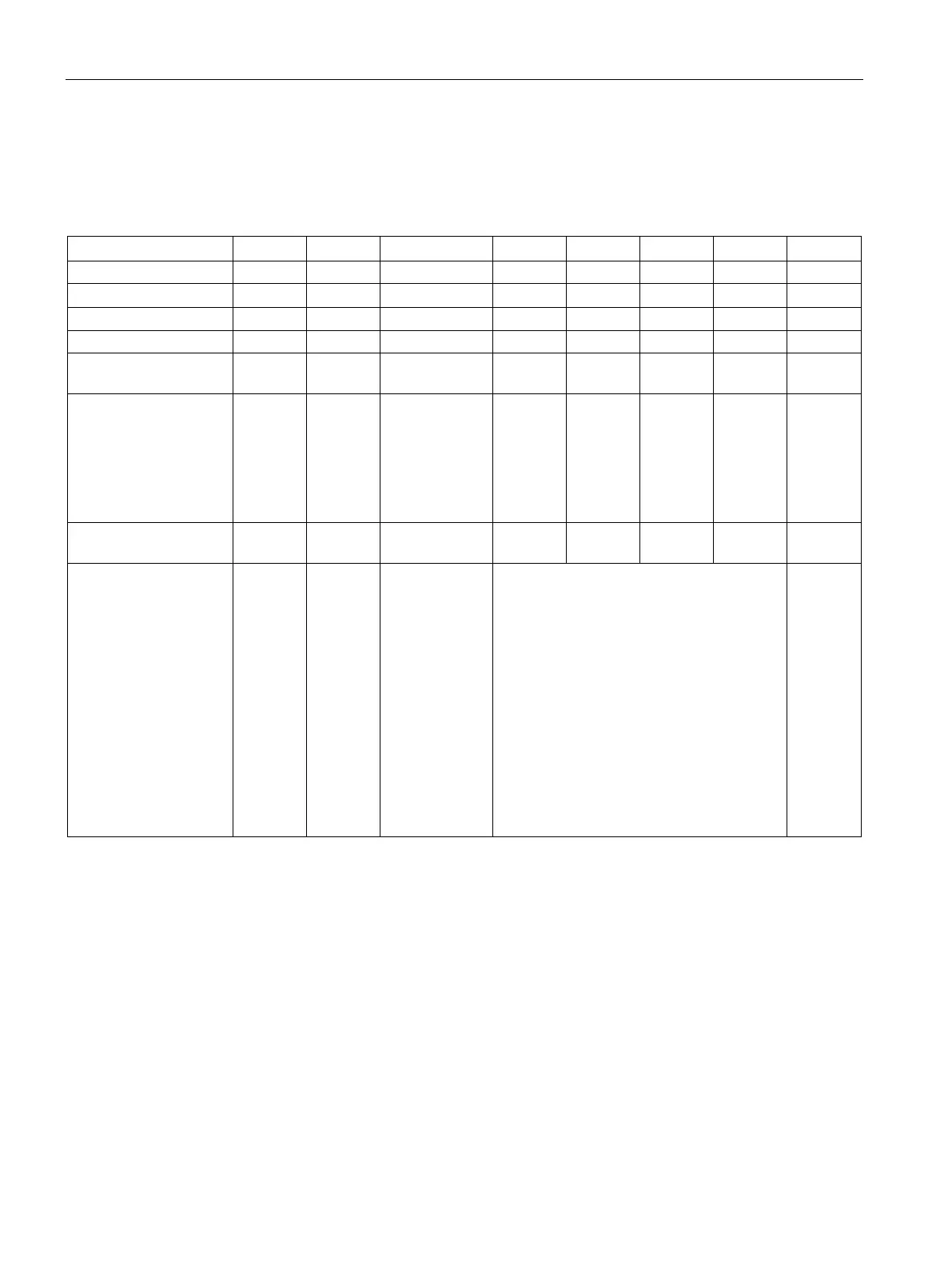
The following table contains a few examples for data set changeover. The initial data set is
always DDS0.
Table 8- 8 DDS changeover without load gear position tracking
EDS0 EDS0 EDS0 EDS0 EDS0 EDS4 EDS5 EDS0
p2502 (encoder for
position control)
Encod-
encod-
encoder_1 Encod-
Encod-
Encod-
Encod-
Encod-
p2504/p2505/p2506/
p2503
A, B and D designate
different mechanical
A A B A A A D A
Load gear position
tracking
Deac-
Deac-
Deactivated Deac-
Deac-
Deac-
Deac-
Deac-
--- Change-
over
during
pulse
inhibit or
operation
has no
effect
Pulse inhibit:
Position actual
value prepro-
cessing is new-
ly initiated
1)
referencing bit
2)
is reset.
Operation:
Fault is output.
Position actual
value prepro-
cessing is
newly initiated
1)
2)
Pulse inhibit:
Position actual value preprocessing is newly
initiated
1)
and referencing bit
3)
is reset.
Operation:
Fault is output. Actual position value condi-
tioning newly set
1)
and referencing bit
3)
is
reset.
MDS
changeo-
ver alone
during
pulse
inhibit or
operation
has no
effect
"Is newly initiated" means: For absolute encoders, the absolute value is read out again and for incremental encoders a
restart is performed as after a POWER ON.
For incremental encoders r2684.11 ("Reference point set") is reset, and additionally for absolute encoders the status of
adjustment (p2507).
For incremental encoders r2684.11 ("Reference point set") is reset, and for absolute encoders the status of adjustment
(p2507) is not reset in addition, because the encoder data set is different from the original.
 Loading...
Loading...

























