Servo control
Drive functions
84 Function Manual, 11/2017, 6SL3097-4AB00-0BP5
Comparison of servo control and vector control
The table below shows a comparison between the characteristic features of servo and vector
controls.
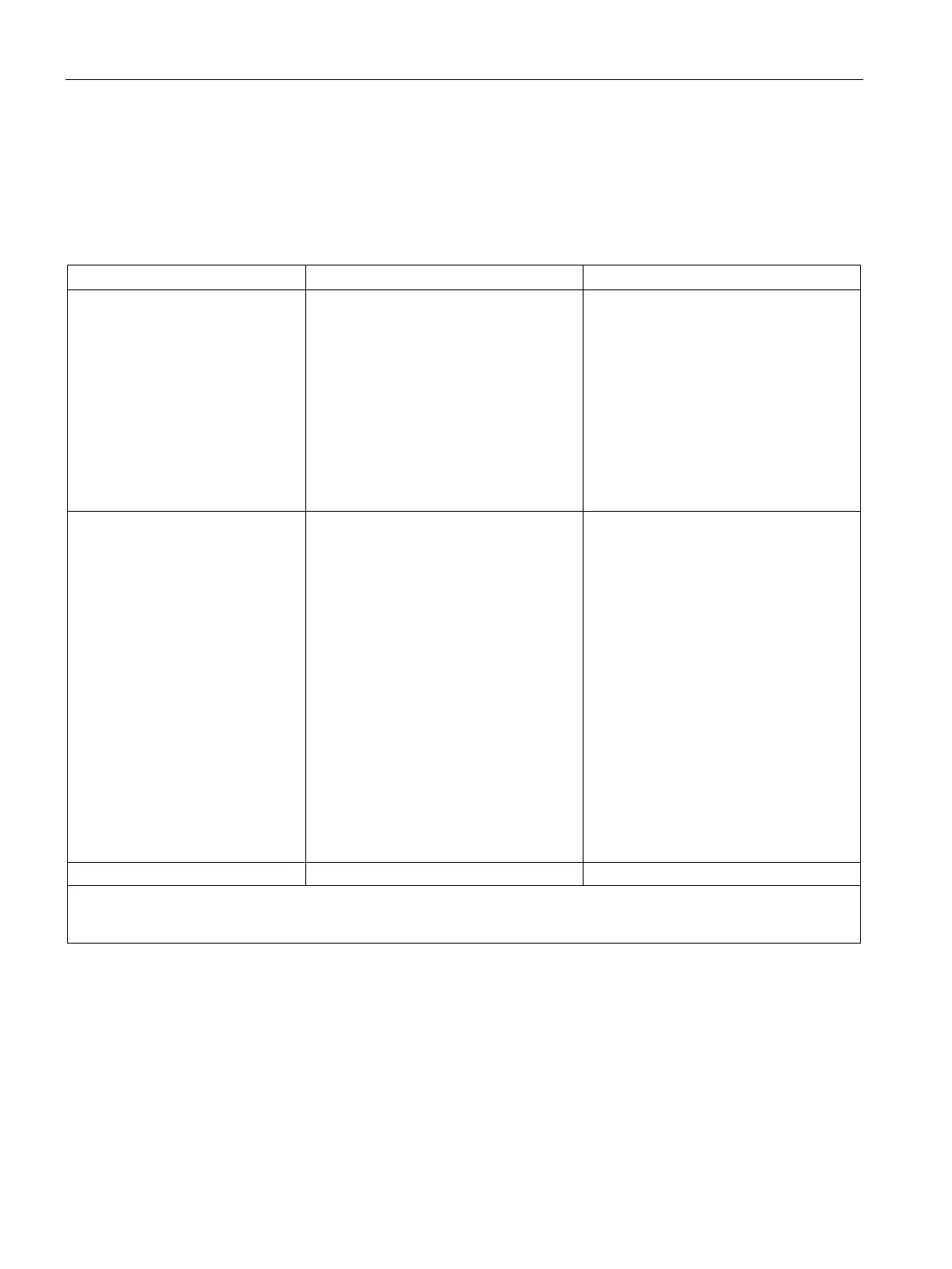
Table 4- 1 Comparison of servo control and vector control
Typical applications
• Drives with highly dynamic motion
control
• Drives with high speed and torque
accuracy
(servo synchronous motors)
• Angular-locked synchronism with
isochronous PROFIdrive
• For use in machine tools and clocked
production machines
• High output frequency
• Speed and torque-controlled drives
with high speed and torque accuracy,
particularly in operation without an
encoder (sensorless operation)
Maximum number of drives that
can be controlled by one Control
Unit
To be taken into consideration:
Chapter "Rules for wiring with
DRIVE-CLiQ (Page 1014)"
in this document below
• 1 infeed + 6 drives
(with current controller sampling times
125 μs or
speed controller sampling times
125 μs)
• 1 infeed + 3 drives
(with current controller sampling times
62.5 μs or
speed controller sampling times
62.5 μs)
• 1 infeed + 1 drive
(with current controller sampling times
31.25 μs or speed controller sampling
times 62.5 μs)
• Mixed operation, servo control with
125 µs with V/f, max.11 drives
• 1 infeed + 3 drives
(with current controller sampling times
250 μs or
speed controller sampling times 1 ms)
• 1 infeed + 6 drives
(with current controller sampling times
400 μs / 500 μs or
speed controller sampling times
1.6 ms/2 ms)
• V/f control:
1 infeed + 12 drives
(with current controller sampling times
500 μs or
speed controller sampling times
2000 μs)
• Mixed operation, vector control with
500 µs with V/f, max.11 drives
Additional information on the sampling conditions is provided in subchapter "Rules regarding sampling times (Page 1007)"
 Loading...
Loading...

























