Communication
11.5 Communication via EtherNet/IP
Drive functions
880 Function Manual, 11/2017, 6SL3097-4AB00-0BP5
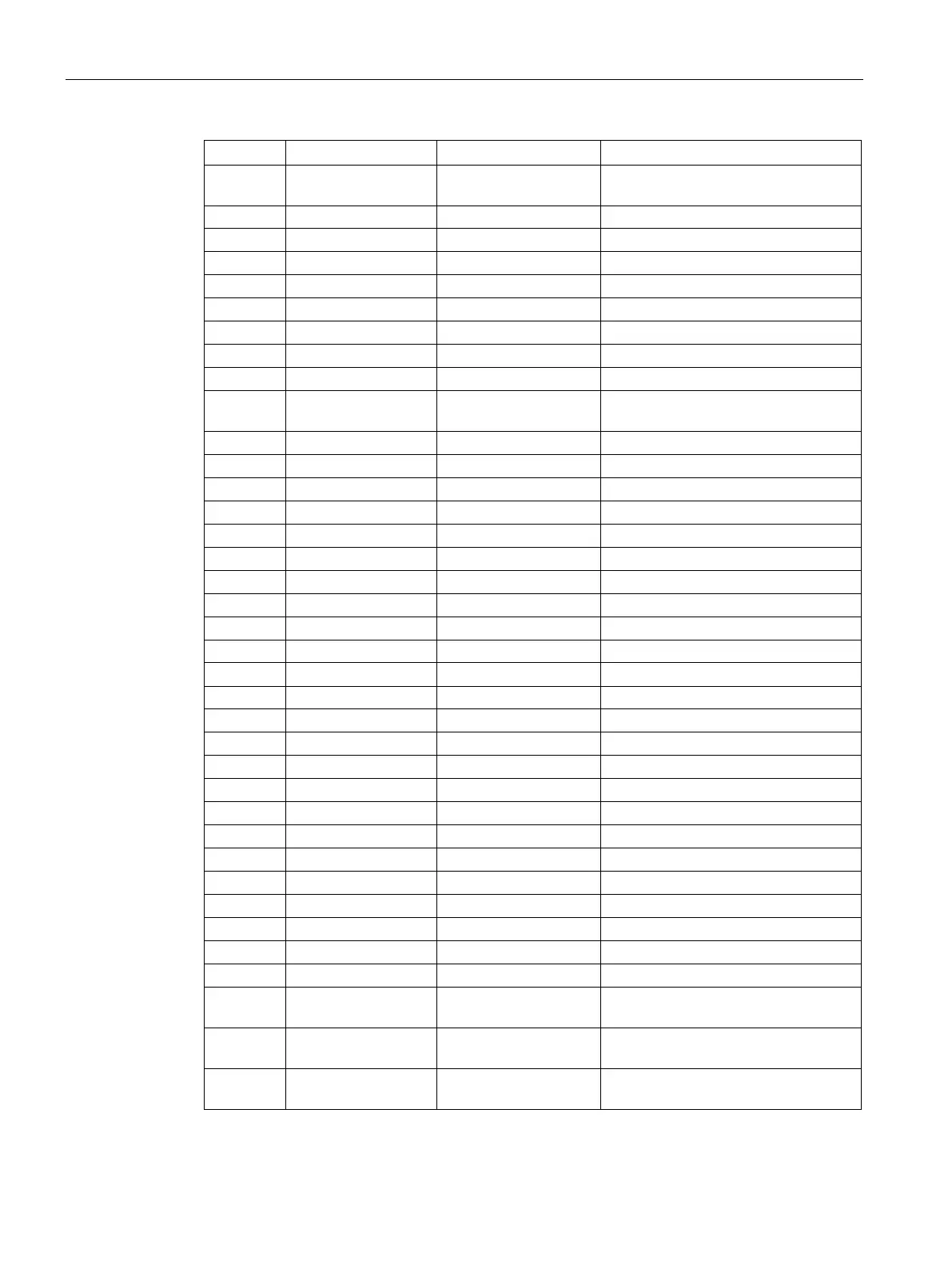
49 get, set PID Down Limit p2292 technology controller minimum
50 get Speed setpoint r0020 speed setpoint
52 get Output Voltage r0025 output voltage
r0027 current actual value
r0031 torque actual value
r0032 actual active power value
r0035[0] motor temperature
58 get Power Unit Tempera-
r0037[0] power unit temperature
r0050 active command data set
r0722 digital inputs status
r0747 digital outputs status
69 get Analog Output 2 r0774[1] analog output 2
71 get Fault Code 2 r0947[1] fault number 2
r1801 actual pulse frequency
83 get PID setpoint Output r2260 technology controller setpoint
after the ramp-function generator
84 get PID Feedback r2266 technology controller actual
85 get PID Output r2294 technology controller output
The instances are assigned using the slot sequence in p0978.
 Loading...
Loading...

























