Chapter 10 VME Bus Address
Adept MV Controller User’s Guide, Rev. B 183
In systems with an EJI (Adept robot systems) in addition to MI6/MI3(s), the first
MI6/MI3 board should be set to servo board number 3. In systems with two EJI
boards (dual Adept robots) the second EJI should be set to servo board 3. This
allows optimal processor allocation for the servo code with the default V
+
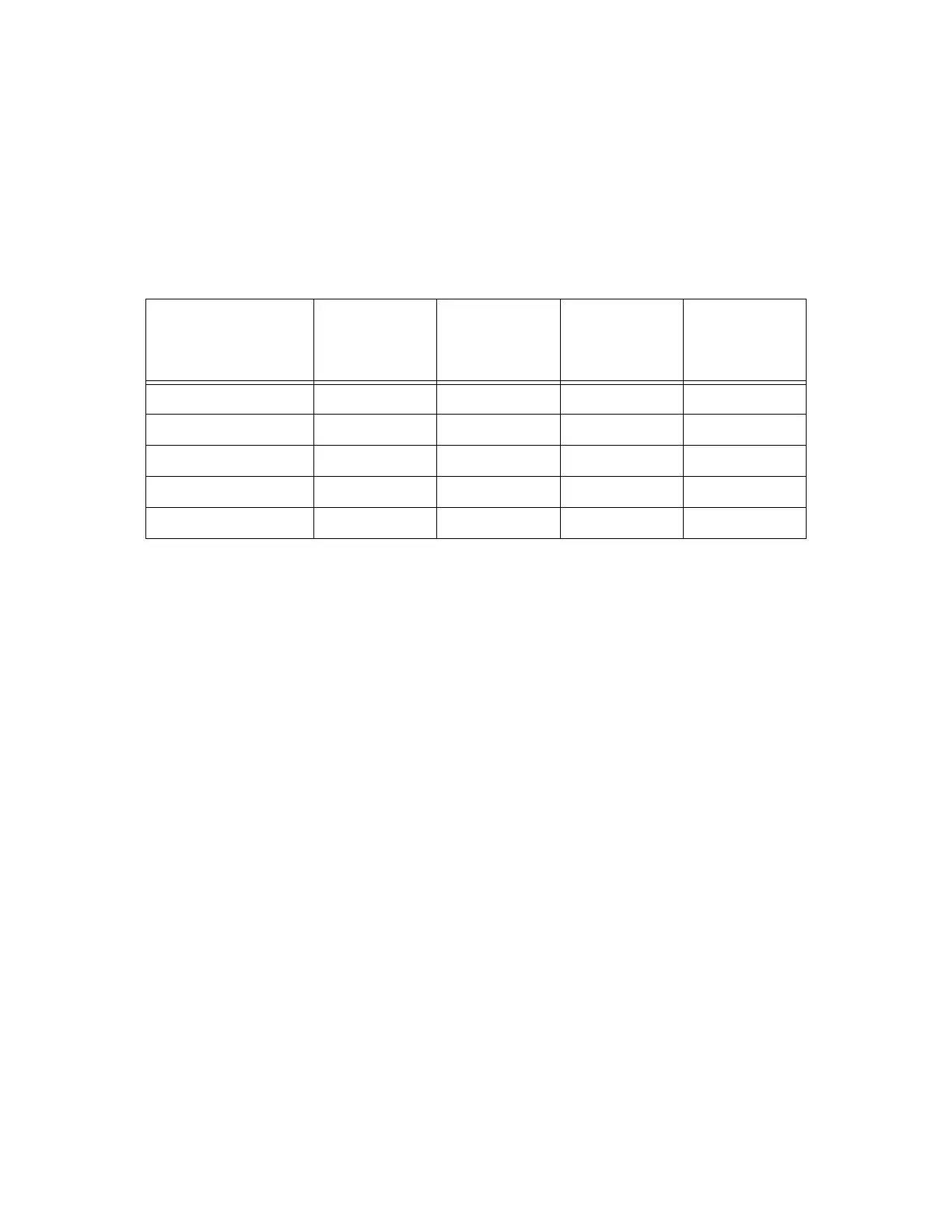
software configuration. See Table 10-2 for examples of address settings for
various configurations.
Table 10-2. VME Bus Address Settings for Multiple Servo Board Systems
a
a
For systems equipped with the Adept FlexFeeder system: The VJI board for FlexFeeder
number 1 should be addressed as servo board number 2 and the VJI board for FlexFeeder
number two should be addressed as servo board number 4.
First Board
Address
Second
Board
Address
Third Board
Address
Fourth
Board
Address
2 MI6 1 – MI6 3 – MI6
1 VJI plus 1 MI6 1 – VJI 3 – MI6
2 VJI 1 – VJI 3 – VJI
2 VJI plus 1 MI6 1 – VJI 3 – VJI 5 – MI6
2 VJI plus 2 MI6 1 – VJI 3 – VJI 5 – MI6 7 – MI6
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com