Appendix D Moving a Robot or Motion Device With the MCP
256 Adept MV Controller User’s Guide, Rev. B
Figure D-15. TOOL State (Six-Axis Robot)
Joint State
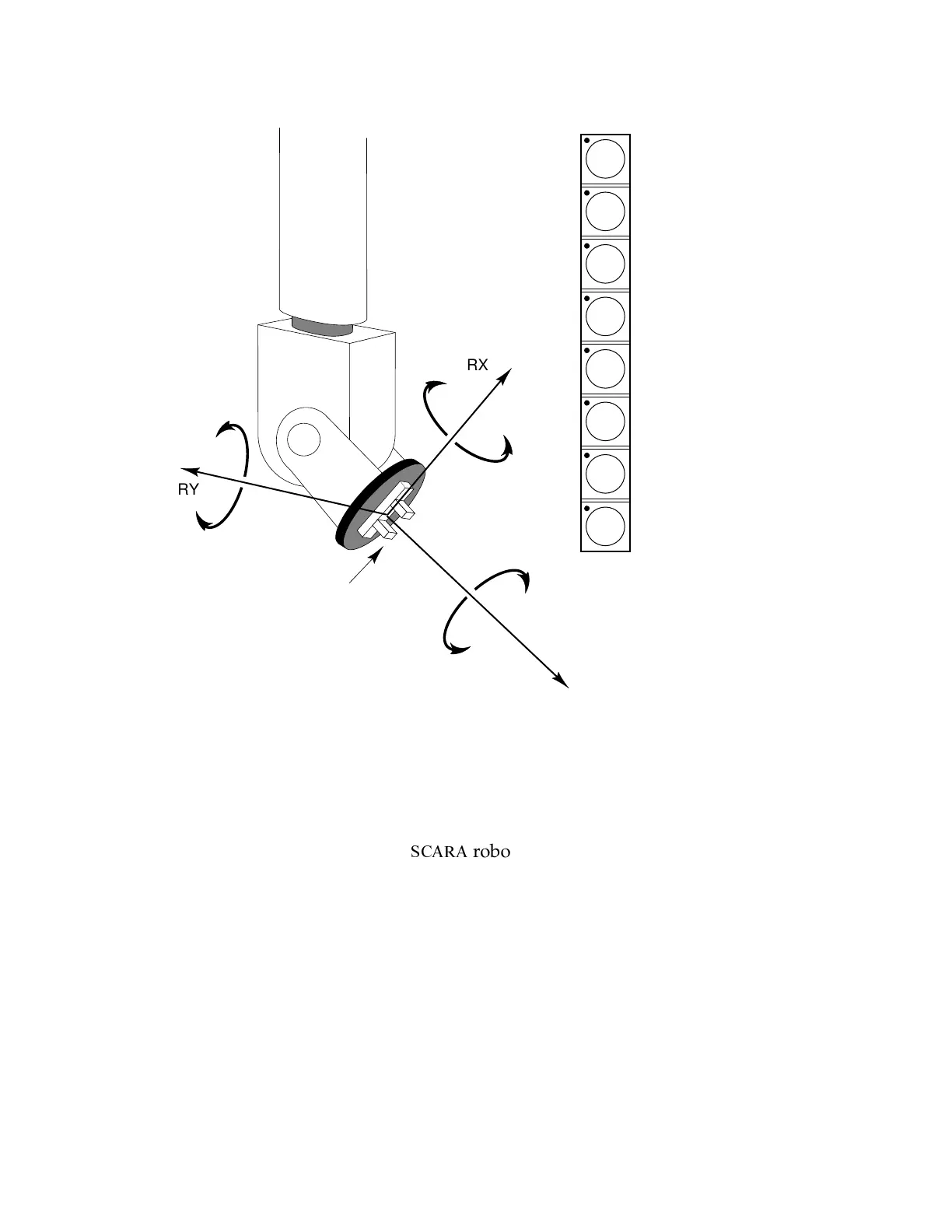
When joint state is selected, movement is about the axis of the specified joint.
Figure D-16 shows an Adept
'-
robot with three rotational joints
(Joints 1, 2, and 4) and one translational joint (Joint 3). Positive rotation of joints 1
and 2 is counterclockwise as viewed from above. Positive rotation of Joint 4 is
clockwise as viewed from above. Positive movement of Joint 3 is downward.
Before the speed bars will move a joint, the correct joint must be selected from the
manual control buttons.
T
1
RZ
6
RY
5
RX
4
Z
3
Y
2
X
1
Rotation about
TOOL X axis
Rotation about
TOOL Y axis
Rotation about
TOOL Z axis
Gripper
RX
RY
RZ
T
1
STEP
Rotation about
TOOL X axis
Rotation about
TOOL Y axis
Rotation about
TOOL Z axis
Gripper activity
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com